Дипломная работа: Проектирование привода горизонтального канала наведения и стабилизации ОЭС
Министерство общего и профессионального
образования РФ
Тульский государственный университет
Кафедра автоматики и телемеханики
Проектирование привода горизонтального канала
наведения и стабилизации ОЭС
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К ДИПЛОМНОМУ ПРОЕКТУ
Тула 1998г.
Содержание
Введение........................................................................................................... 6
1. Обоснование актуальности темы
и постановка задачи............................. 8
2. Обзор литературы по следящим
приводам............................................. 10
3. Разработка алгоритма
проектирования следящего привода.................. 13
4. Определение зависимости
скорости и ускорения наведения АОП от дальности 15
5. Расчет потребной мощности ЭДВ............................................................ 18
6. Определение типа и параметров
ЭДВ...................................................... 19
Наименование характеристик....................................................................... 20
7. Расчет зон работы следящего
привода.................................................... 22
8. Определение параметров
математической модели двигателя................. 24
9. Формирование скоростного
контура привода ГН.................................. 29
10. Определение параметров
корректирующих устройств скоростного привода 34
11. Формирование контура
наведения и стабилизации с определением параметров корректирующих устройств......................................................................... 38
12. Определение точностных
характеристик............................................... 47
13. Разработка конструкции и
технология изготовления БУ следящего привода 50
13.1. Конструкция платы БУ
привода.......................................................... 50
13.2. Технологическая часть......................................................................... 54
13.3. Расчет показателей
надежности БУ следящего привода.................... 56
14. Охрана труда и окружающей среды...................................................... 59
14.1. Охрана труда........................................................................................ 59
14.1.1. Анализ вредных и опасных
производственных факторов.............. 59
14.1.2. Требования к
производственному помещению............................... 60
14.1.3. Микроклиматические
условия производственного помещения и вентиляция. 62
14.1.4.
Требования к освещению производственного помещения.............. 66
14.1.5. Техника безопасности....................................................................... 68
14.2. Охрана окружающей среды................................................................ 71
15. Организационно-экономический
раздел................................................ 77
15.1. Составление и расчет
сетевого графика.............................................. 77
15.2. Расчет затрат на
проектирование и изготовление следящего электропривода 85
Заключение.................................................................................................... 93
Библиографический список........................................................................... 94
Приложения................................................................................................... 96
Реферат
Данный дипломный
проект посвящен проектированию привода горизонтального канала наведения и
стабилизации(ГКНиС) ОЭС и включает в себя расчет параметров двигателя
привода, разработку скоростного и позиционного контура следящей системы,
составление функциональной схемы и структурной схемы линейной математической модели
следящего привода. Синтез системы производится исходя из требований по времени
переброса и точности слежения за подвижным объектом в условиях воздействия
качек на носитель следящей системы.
Конструкторско-технологический
раздел включают в себя разработку конструкции печатной платы БУ привода,
составление технологического процесса ее изготовления, производится расчет
теплового режима работы платы и надежность эксплуатации устройства.
Большое внимание уделено охране
труда и окружающей среды. Производится расчет параметров производства печатных
плат БУ привода ГКНиС: количества людей, занятых непосредственно изготовлением
изделий, размеров цеха, расстановка оборудования, вентиляции, освещения. Определяется
категория пожаробезопасности производства, схема эвакуации людей при пожаре и
расположение противопожарного оборудования
Экономической часть
включает в себя составление сетевого плана проектирования и изготовления
опытного образца привода ГКНиС ОЭС, расчет критического пути и себестоимости
ОКР и стоимости опытного образца привода ГКНиС.
Введение
Автоматическое управление различными объектами
приводит к необходимости разработки создания сложных систем, включающих в себя
вычислительные машины, автоматические регуляторы, исполнительные устройства
т.п.
В системах управления
широкое применение получили устройства с механическим выходом, т.е.
автоматизированные приводы, в которых в подавляющем большинстве случаев
перемещение выходного звена пропорционально (или равно) входной управляющей координате.
Автоматизированные приводы с указанными свойствами относятся к классу следящих
систем.
Выходной вал
следящего привода с определённой степенью точности воспроизводит в виде
механического перемещения входной управляющий сигнал. При этом исполнительный
двигатель должен преодолевать имеющиеся на выходном валу нагрузки (возмущающие
воздействия) и развивать скорости и ускорения, обеспечивающие его слежение за
входным управляющим воздействием, а система управления двигателем должна обеспечивать
необходимую точность слежения, которые, как правило, должны обладать высокой
динамической точностью.
Требуемые
динамические свойства привода и типичные законы изменения управляющих и
возмущающих воздействий зависят от назначения системы управления в целом и
функций, выполняемых в ней приводом. По этим признакам следящие системы могут
быть разбиты на следующие группы: приводы систем автоматического сопровождения,
приводы пусковых устройств, приводы устройств гиростабилизированных платформ,
приборные приводы и т.д.
Данная работа
посвящена проектированию привода системы, относящейся к классу систем
автоматического сопровождения (САС). К этой группе относятся приводы широкого
класса систем, предназначенных для слежения за объектами, перемещающимися в
пространстве (приводы систем радиолокационных камер, оптических визиров,
координаторов, астроориентиров). Требования к динамике определяются законом
движения объекта и условиями наилучшей фильтрации случайной составляющей
входного сигнала. Необходимо учитывать и значительные возмущения в виде «ветрового момента». Приводы, установленные на
подвижном основании, должны обеспечивать высокую точность отработки угловых
колебаний основания.
Основные задачи
проектирования состоят в выявлении требуемых динамических свойств привода, в
выборе исполнительного двигателя, обладающего нужными предельными динамическими
возможностями, определении метода разработки системы управления, которая при
максимальной простоте и надёжности и минимальных габаритах и весе обеспечивает
необходимую динамику и точность.
При проведении
расчетов были использована пакеты прикладных программ МаthCAD 6.0 plus, МаthCAD
7.0 и MathLab 5.0.
1. Обоснование актуальности темы и постановка задачи
Автоматизация
процессов управления различными объектами сопровождается широким использованием
следящих приводов. Следящие приводы нашли применение во многих областях
техники. Они используются в системах управления металлорежущими станками,
металлургическими прокатными станами, шагающими экскаваторами, в системах
управления манипуляторами, в моделирующих стендах, в системах управления объектами
вооружения и т.д. Уже из этого краткого перечня видно, сколь значительно число
задач, решение которых может быть возложено на следящие приводы.
Применение
современных следящих приводов практически во всех областях хозяйства и
промышленности, обусловлено необходимостью повышения качества выпускаемой продукции.
Применение
современных следящих приводов в военной технике является необходимым фактором,
который способствует повышению тактико-технических характеристик систем
слежения и ведения огня. Точность, скорость, качество и надежность работы современного
вооружения при обеспечении боевой готовности армии и в боевых условиях играет
важную роль в поддержании обороноспособности страны.
Задачей данного
дипломного проекта является проектирование и расчет следящего привода
горизонтального канала наведения и стабилизации ОЭС, предназначенного для сопровождения
объекта слежения.
Чтобы обеспечить
высокие статические и динамические характеристики следящего привода необходимо
правильно спроектировать и рассчитать его, чему и будет посвящена данная работа.
Исходные данные для
расчета:
1) Объект слежения:
Диаметр корпуса d=0,5
м;
Длина корпуса l=4,5
м;
Скорость движения
Vo=600 м/c;
Коэффициент излучения
объекта e=0,8;
Характеристики
движения объекта:
Параметр движения
Р=500 м;
Высота движения Н=300
м;
Дальность
сопровождения не менее Dc=6 км;
2) Атмосфера:
Метеовидимость Мдв=20
км;
Относительная
влажность r=90%;
Температура окр.
cреды t=150 C;
3) Привод:
Момент инерции
вращающейся части АОП JГН = 8 кгžм2
;
Масса нагрузки mН
= 170 кг ;
Максимальный
возмущающий момент МВ = 50 Нžм
:
статический момент
сопротивления повороту МСТ = 30 Нžм,
аэродинамический
момент МАЭР = 15 Нžм,
статический момент неуравноешивания
МНЕУР = 5 Нžм ;
Нижняя частота
собственных колебаний fK = 100 Гц ;
Углы наведения от
-900 до +900 ;
Наведение : скоростьMAX
= 100 0/c, ускорение =220 0/с2, скоростьMIN
= 0,02 0/c.
2. Обзор литературы по следящим приводам
В настоящее время, в
связи с широким применением и развитием следящих систем, имеется множество
публикаций и изданий по СС. В ходе выполнения дипломного проекта был произведен
поиск и обзор литературы по следящим приводам и сопутствующей тематике (ТАУ и
т.п.), в результате чего получены следующие сведения.
В книге
«Проектирование следящих систем» под редакцией д.т.н., профессора Л.В.
Рабиновича 1969 года выпуска [1] изложены теоретические основы и методика
расчета и проектирования следящих приводов. Рассмотрены метод выбора
исполнительного двигателя по предельным динамическим возможностям и энергетике,
синтез следящих систем, близких к линейным, обеспечивающих заданную динамическую
точность. Освещены методы повышения динамической точности, основанные на
комбинированном управлении и теории инвариантности, и методы учета и анализа
влияния нелинейностей с использованием логарифмических характеристик. Приведены
методы расчета и проектирования релейных систем, в том числе оптимальных по
быстродействию, рассмотрены особенности проектирования механических передач.
В двух книгах
«Следящие приводы» под редакцией д.т.н., профессора Б.К. Чемоданова 1976 г. [2]
изложены основные вопросы теории и проектирования одноканальных и двухканальных
следящих приводов. Рассмотрены методы анализа и синтеза как непрерывных, так и
дискретных (импульсных и цифровых) следящих приводов. Значительное внимание
уделено динамике следящих приводов, имеющих в своем составе различные нелинейные
звенья. Приведены основные энергетические соотношения и дан анализ влияния
ограничения мощности источников энергии на работу следящего привода.
Книги И.М. Макарова и
Б.М. Менского «Линейные автоматические системы» 1982 года [3] и «Техническая
кибернетика. Теория автоматического регулирования» под редакцией д.т.н.,
профессора В.В. Солодовникова 1967 года [5] содержат сведения из теории
непрерывных линейных систем автоматического регулирования и обширный справочный
материал для их анализа и синтеза. В них рассматриваются общие дифференциальные
уравнения, методы структурного преобразования, статические и динамические
характеристики САР. Основное внимание уделено стационарным системам при детерминированных
внешних воздействиях. Приводятся методы анализа устойчивости, качества и
переходных процессов непрерывных линейных систем. Приведено много типовых схем
и примеров расчета.
Книга В.А.
Бесекерского и Е.П. Попова «Теория систем автоматического регулирования» [4],
представляет собой монографию, посвященную систематическому изложению теории автоматического
регулирования и управления. Она содержит все основные разделы ТАУ: теорию
обыкновенных и особых линейных систем, теорию нелинейных, адаптивных и цифровых
систем.
В труде специалиста
из ФРГ Р. Изермана «Цифровые системы управления» 1984 года [6] рассмотрены
современные методы расчета и проектирования цифровых систем управления с
детерминированными и случайными возмущениями. Значитель-ное внимание уделено
теории многосвязанных и адаптивных систем.
Книга Х. Гурецкого
«Анализ и синтез систем управления с запаздыванием» 1974 года [7] посвящена
изложению методов анализа линейных, нелинейных и импульсных систем
автоматического регулирования с запаздыванием и методов выбора параметров типовых
регуляторов. Большое внимание уделено математическому описанию и идентификации
объектов регулирования с запаздыванием.
В учебнике М.А.
Павловского «Теория гироскопов» 1986 г. [8] излагаются основы теории
механических гироскопов, дана элементарная теория гироскопов и гироскопических
явлений. Значительное внимание уделено методам составления уравнений (как точных,
так и приближенных) движения гироскопов как системы твердых тел. Рассмотрены
особенности поведения двух- и трехстепенных гироскопов как на неподвижном, так
и на движущемся основании с учетом моментов сил сухого, вязкого трения,
технологических погрешностей изготовления и сборки приборов, упругих деформаций
элементов подвеса.
Показано влияние
различных типов коррекции гироскопов на их устойчивость и погрешности на
подвижном основании. Приведены различные методы уменьшения возмущающих моментов
и автокомпенсации уходов гмроскопа (применением двухгироскопных систем,
вращением подвеса, применением динамических поглотителей колебаний, виброзащиты).
Указаны возмущающие моменты, которые не устраняются тем или иным методом.
Кратко изложена
теория невозмущающих маятников.
Должное внимание
уделено изложению основ теории и причин погрешностей вибрационных гироскопов
различных типов.
В учебнике А.А.
Одинцова «Теория и расчет гироскопических приборов» 1985 года выпуска [9]
рассмотрны гироскопические приборы двух типов: построители характерных направлений
в опорной (как правило, земной) системе координат (гирокомпасы, гировертикали,
гирокомпасы направлений и др.) и измерительные преобразователи параметров
движения объектов (гиротахометры, гироинтеграторы линейных ускорений и др.)
Изложены принципы построения и работы приборов,
методика составления их математических моделей с учетом основных помех, расчет
погрешностей, пути повышения точности измерений.
3. Разработка алгоритма проектирования следящего
привода
Следящий привод,
установленный на подвижном основании обычно замкнут по углу поворота нагрузки.
С целью улучшения динамических характеристик он может содержать местную
обратную связь по скорости двигателя или скорости нагрузки, компенсирующие
связи по управляющему и возмущающему воздействиям. Алгоритм проектирования следящего
привода представлен на рисунке 3.1.
Приводы
полуавтоматических систем слежения, размещенные на неподвижном основании,
замыкаются по скорости исполнительного двигателя. Поэтому целесообразно рассмотреть
вначале проектирование замкнутого по скорости привода.
Анализ динамических
возможностей и энергетических характеристик привода является важным этапом
процесса проектирования, который следует проводить непосредственно после
выявления технических требований к приводу.
Значения скоростей и
ускорений, которые может развивать реальный привод, ограниченный по величине.
Если требуемые скорости и ускорения выше тех значений, которые способен
обеспечивать привод, то попытки получения удовлетворительного функционирования
привода введением каких - либо корректирующих устройств будут безуспешны.
Никакая система управления исполнительным двигателем не может обеспечить требуемые
моменты или скорости, если они не заложены в самой конструкции исполнительного
механизма. Корректирующие устройства предназначены для обеспечения требуемой
точности привода и более полного использования его динамических возможностей.
Мощность, которую
привод может рассеивать, не нагреваясь свыше допустимой температуры, также
ограничена по величине. Если мощность, теряемая в приводе в процессе работы в
заданном режиме, выше допустимой, то необходимо использовать дополнительные
меры охлаждения, сократить время работы или применить другой, более мощный
привод. Поэтому анализ энергетических характеристик привода также должен
предшествовать расчету его динамики.
Анализ динамических
возможностей и энергетических характеристик привода целесообразно проводить на
этапе выбора исполнительного двигателя, который осуществляется методом
последовательных приближений, т.е. пригодность выбранного в первом приближении
двигателя проверяется детальным анализом его динамических возможностей и
энергетических характеристик.
Алгоритм
проектирования следящего привода
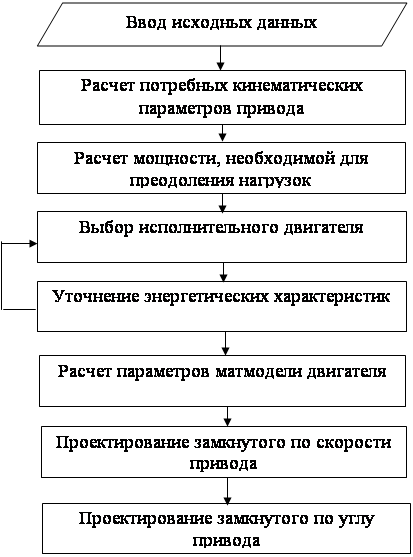
Рисунок 3.1.
4. Определение зависимости скорости и ускорения
наведения АОП от дальности
Определим угловые
скорости и ускорения привода, моменты времени, когда они достигают
экстремальных значений.
Исходными данными для
расчета являются:
- закон движения и
его параметры;
- параметры угловых
колебаний подвижного основания.
1)В проектируемой
следящей системе реализуется закон равномерного прямолинейного движения,
характеризующийся постоянными значениями линейной скорости объекта слежения Vo,
высоты Н, параметра движения объекта Р:
Характеристики горизонтального
канала
 (4.1)
(4.1)
где  , - время слежения от
начала процесса до момента прохождения параметрового участка (ОУ);
, - время слежения от
начала процесса до момента прохождения параметрового участка (ОУ);
 , -коэффициент.
, -коэффициент.
Угловая скорость
 (4.2)
(4.2)
Угловое ускорение
 (4.3)
(4.3)
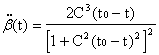
Графики,
характеризующие закон движения представлены на рисунке 4.1.
Максимальные значения
характеристик горизонтального канала можно определить по следующим формулам:
 МАКС = V0/P, (4.4)
МАКС = V0/P, (4.4)
где  МАКС -
максимальная угловая скорость.
МАКС -
максимальная угловая скорость.
 МАКС = 0,65×V02/P2,
(4.5)
МАКС = 0,65×V02/P2,
(4.5)
где  МАКС -
максимальная угловое ускорение.
МАКС -
максимальная угловое ускорение.
2)Угловые колебания
подвижного основания заданы гармоническим законом:
 (4.6)
(4.6)
где A=50
-амплитуда колебаний подвижного основания,
 - частота колебаний
подвижного основания.
- частота колебаний
подвижного основания.
fk=0,8
Угловая скорость колебаний
подвижного основания
 (4.7)
(4.7)
Графики закона движения.
1 – положение объекта
слежения b, рад;
2 – скорость движения
объекта слежения  , с-1;
, с-1;
3 – ускорение объекта
слежения  ,
с-2.
,
с-2.
Рисунок 4.1.
Максимальная угловая
скорость колебаний
 (4.8)
(4.8)
Угловое ускорение колебаний
подвижного основания
 (4.9)
(4.9)
Максимальное угловое
ускорение колебаний
 (4.10)
(4.10)
На основе проведенных
расчетов получены следующие данные :
 МАКС = 1,2
рад/c
МАКС = 1,2
рад/c
 МАКС = 0,935
рад/c2
МАКС = 0,935
рад/c2
 = 5,027 рад/c
= 5,027 рад/c
 = 0,439 рад/c
= 0,439 рад/c
 = 2,205 рад/c2
= 2,205 рад/c2
5. Расчет потребной мощности ЭДВ
Расчет мощности,
необходимой для преодоления нагрузки, проводим по следующим формулам:
 (5.1)
(5.1)
где  - суммарный момент
нагрузки,
- суммарный момент
нагрузки,
 - суммарная скорость.
- суммарная скорость.
 (5.2)
(5.2)
 рад/c
рад/c
 (5.3)
(5.3)
где  - момент двигателя без
нагрузки.
- момент двигателя без
нагрузки.
 (5.4)
(5.4)
 Нм
Нм
 50+25,122=75,122 Нм
50+25,122=75,122 Нм
Таким образом
получаем:
 Вт
Вт
6. Определение типа и параметров ЭДВ
На основании расчетов был выбран бесконтактный
моментный электродвигатель с номинальным моментом 120 Нм. Полное наименование -
бесконтактный моментный электродвигатель постоянного тока ДБМ. Служит для
систем стабилизации и наведения по двум каналам - горизонтальному и
вертикальному (ГН и ВН). Параметры электродвигателя представлены в таблице 6.1.
В состав ДБМ входят :
1) бесконтактный моментный
электродвигатель (Д);
2) сборки статора и
ротора датчика угла (ДУ);
3) блок обработки
сигнала датчика угла (БОСДУ);
4) силовой коммутатор
двигателя (К);
5) сборки статора и
ротора тахогенератора (ТГ);
6) блок обработки
сигнала тахогенератора (БОСТГ);
7) оконечное
устройство (ОУ).
Сигнал управления электродвигателем - аналоговый,
постоянного тока, двуполярный, общая точка электрически не связана с минусом
источника питания 27 В.
Зона нелинейности
±12 В.
Величина входного сигнала, соответствующая
номинальным параметрам электродвигателя +12 В, -12 В.
Блок обработки
сигналов датчика угла выдает :
1) сигнал по
положению ротора для обеспечения силового коммутатора ;
2) цифровой сигнал по углу поворота вала двигателя,
при этом реализуется преобразователь угол - код, обеспечивающий измерение и
выдачу в цифровую вычислительную систему (ЦВС) углов поворота вала с ошибкой не
более 20 угловых секунд, разрядности не менее 16.Диапазон измерительных углов
0-360°, максимальная угловая скорость 66 об./мин. Обмен информацией между
аппаратурой ДБМ и ЦВС производится по магистральному последовательному
интерфейсу, при этом ЦВС выполняет функции контролера, а оконечное устройство
(ОУ) входит в состав аппаратуры электродвигателя.
Таблица 6.1.
Параметры
электродвигателя
| № |
|
Значение |
|
|
1 |
Номинальная
частота вращения Wном, об/мин |
20,0 |
|
2 |
Минимальная
частота вращения Wмин, об/мин |
0,1 |
|
3 |
Номинальный
момент Мном, Нм |
120,0 |
|
4 |
Пусковой
момент Мп, Нм |
240,0 |
|
5 |
Номинальный
ток Iном, А |
20,0 |
|
6 |
Пусковой
ток Iп, А |
40,0 |
|
7 |
Номинальное
напряжение питания U, В |
57,0 |
|
8 |
Сопротивление
статорной обмотки Rс, Ом |
1,4 |
|
9 |
Электромагнитная
постоянная времени Тэл,мс |
10,0 |
|
10 |
Размеры:
-
наружный диаметр статора, мм
-
внутренний диаметр электродвигателя, мм
-
длина, мм
|
240,0
70,0
120,0
|
|
11 |
Масса
электродвигателя mдв, кг
-
ротора, кг
-
статора с обмотками, кг
-
тахогенератора, кг
-
датчика угла, кг
-
корпуса, кг
|
33,5
14,5
15,0
1,0
1,0
2,0
|
|
12 |
Момент
инерции ротора Jр, кгм2
|
0,1 |
|
13 |
Момент
инерции нагрузки Jн, кгм2
|
8,0 |
|
14 |
Максимальный
момент сопротивления Jc, Нм |
50,0 |
|
|
|
|
|
|
|
3) Сигнал по частоте
вращения ротора - 12-ти разрядный код, преобразованный в аналоговый сигнал.
Крутизна сигнала 12 В на 20 об./мин.
Частота обновления
информации 1 кГц. Оконечное устройство обеспечивает сопряжение электрической
аппаратуры БОСДУ электродвигателя по цифровому каналу с ЦВС комплекса,
выполняет адресованные ему команды ЦВС и осуществляет контроль принимаемой
информации. ОУ - является устройством интерфейса по ГОСТ 26765,52 - 87.
Надежность:
·
наработка на
отказ более 20000 часов.
·
ресурс работы
30000 часов.
·
срок службы
25 лет.
Технико -
экономические требования:
Предприятие
изготовитель ВНИИМЭМ(г. Санкт- Петербург).
Ориентировочная
годовая потребность 40 шт. в течение 4-х лет начиная с 1999 г. Цена серийного
образца 3000 у.е.
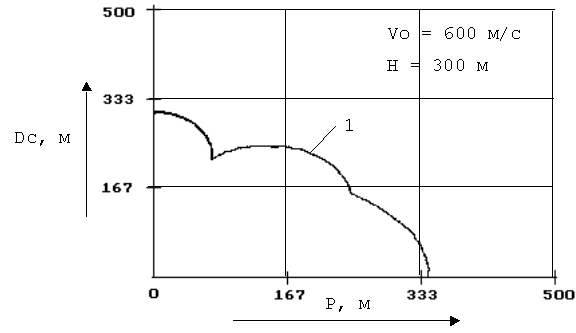
7. Расчет зон работы следящего привода
Пространственная область
применения следящих приводов может быть оценена путем построения зон предельных
скоростей и ускорений приводов. Пространство внутри зоны является запретным.
Наглядное
представление о зоне дает изометрическая проекция, построенная в трехмерном
координатном пространстве (H, P, Dс), но чаще всего строят вертикальные и
горизонтальные сечения зон. Вертикальное сечение представляет собой проекцию пространственной
зоны на координатную плоскость (Н, Dс), вычисленную в предположении Р = const
, Vо = const, Н = var, Dс = var.
Горизонтальное
сечение представляет собой проекцию пространственной зоны на координатную
плоскость (Р, Dс), вычисленную в предположении Н = const, Vо = const, Р =
var, Dс = var. Диапазоны изменения Vо, Р, Н, Dс задаются техническим заданием.
В качестве предельных
значений скоростей и ускорений могут рассматриваться максимальные располагаемые
характеристики, рассчитанные по формулам (4.4), (4.5) или определенные по
графикам (см. рисунок 4.1).
Перепишем формулы
расчета кинематических характеристик горизонтального канала (4.2) и (4.3) в
следующем виде:
 (7.1)
(7.1)
 (7.2)
(7.2)
Если в левых частях
формул (7.1) и (7.2) текущие значения  и
и  заменить их предельными
значениями
заменить их предельными
значениями  МАКС
и
МАКС
и  МАКС
(см. пункт 4), то получим выражения для запретных зон по скоростям и
ускорениям, которые представляют собой решения нелинейных алгебраических
уравнений.
МАКС
(см. пункт 4), то получим выражения для запретных зон по скоростям и
ускорениям, которые представляют собой решения нелинейных алгебраических
уравнений.
Используя метод последовательных итераций решим эти
уравнения с учетом ограничений по предельным значениям скорости и ускорения
наведения горизонтального канала привода, предъявленные техническим заданием
(см. тех. задание и пункт 1). Решение уравнений представляют собой зоны работы
горизонтального канала следящего привода, изображенную на рисунке 7.1.
Зоны работы горизонтального
канала следящего привода
1 – запретная зона
горизонтального канала
по скорости и ускорению
Рисунок 7.1.
8. Определение параметров математической модели
двигателя
Используя параметры
двигателя из базы данных, определим параметры матмодели:
·
скорость
холостого хода
 (8.1)
(8.1)
где Мп -
пусковой момент;
Мном -
номинальный момент;
Wном - номинальная скорость;
·
электромеханическая
постоянная времени
а)собственно
двигателя
 (8.2)
(8.2)
где Jдв -
момент инерции двигателя.
б)двигателя
с учетом нагрузки
 (8.3)
(8.3)
где JS=Jдв+Jр+Jтг+ - суммарный
момент инерции. коэффициент передачи по моменту
- суммарный
момент инерции. коэффициент передачи по моменту
 (8.4)
(8.4)
·
коэффициент
противоэдс
 (8.5)
(8.5)
·
номинальная
электрическая мощность
Pэ=Uном
Jном (8.6)
·
номинальная
механическая мощность
Рном=Мном
Wном (8.7)
·
уравнение
механической характеристики
 (8.8)
(8.8)
(для напряжения
питания ,отличного от Uном).
Механическая характеристика
двигателя.
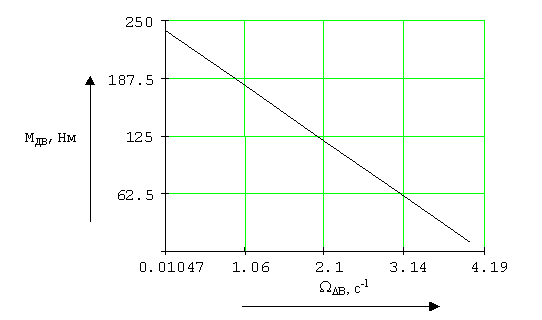
Рисунок 8.1.
·
уравнение
регулировочной характеристики
 (8.9)
(8.9)
Регулировочная
характеристика двигателя.
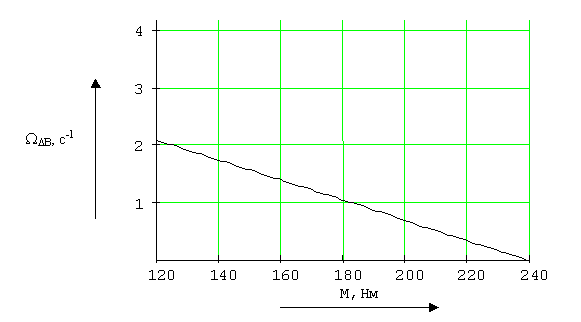
Рисунок 8.2.
·
максимальная
механическая мощность
 (8.10)
(8.10)
·
сопротивление
цепи статора
RC=UНОМ/IНОМ (8.11)
·
индуктивность
цепи статора
 (8.12)
(8.12)
Упрощенная схема матмодели двигателя постоянного
тока может быть представлена структурной схемой:
Структурная схема
двигателя.
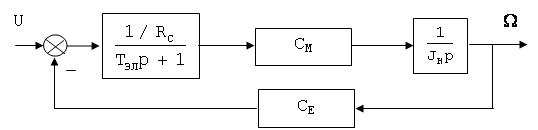
Рисунок 8.3.
В результате
проведенных выше расчетов получены следующие данные (см. таблицу 8.1.).
Результаты
экспериментальных замеров параметров электродвигателя представлены в приложении
1.
Используя параметры
математической модели двигателя и теорию замкнутых систем, изложенную в
литературе [3,4,5], найдем передаточную функцию ЭДВ без нагрузки.
 , (8.13)
, (8.13)
 , (8.14)
, (8.14)
где WДВБН(р)-
передаточная функция ЭДВ без нагрузки;
р = i×w , i= .
.
Построим для передаточной функции
двигателя логарифми-ческие амплитудную и фазовую частотные характеристики (ЛАЧХ
и ЛФЧХ), по методике изложенной в литературе [3].
LДВБН(w)=
20×lg(|WДВБН(р)|), (8.15)
где LДВБН(w)-
логарифмическая амплитудная частотная характе-ристика двигателя под нагрузкой.
jДВБН(w)= arg(WДВБН(р)), (8.16)
где jДВБН(w)- логарифмическая фазовая
частотная характерис-тика двигателя под нагрузкой.
Таблица 8.1.
Параметры матмодели
ЭДВ
| № |
Параметр |
Значение |
| без
нагрузки |
с
нагрузкой |
| 1 |
Тм,
мс |
1,745 |
141,000 |
| 2 |
Jдв,
кгм2
|
0,100 |
8,100 |
| 3 |
Wхх,
рад/с |
4,189 |
| 4 |
См,
Вс |
6,000 |
| 5 |
Се,
Вс |
13,608 |
| 6 |
Рэ,
Вт |
1140,000 |
| 7 |
Рном,
Вт |
251,327 |
| 8 |
Рмакс,
Вт |
251,327 |
| 9 |
Lc,
Гн |
0,014 |
| 10 |
Rc,
Ом |
1,425 |
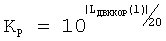
Логарифмические
амплитудная и фазовая частотные характеристики двигателя под нагрузкой
представлены на рисунке 8.4.
Логарифмические амплитудная и фазовая частотные характеристики двигателя
без нагрузки.
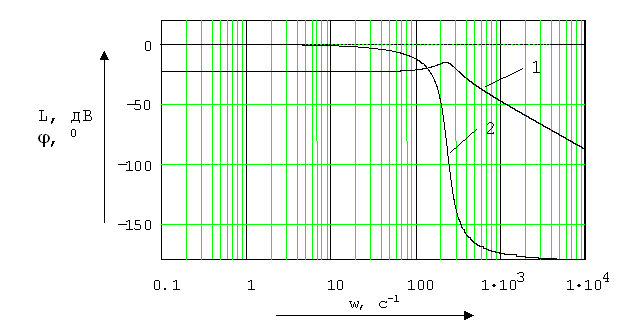
1 – Логарифмические амплитудная частотная характерис-тика LДВБН,
дВ;
2 - Логарифмические фазовая частотная характеристика jДВБН, 0.
Рисунок 8.4.
9. Формирование скоростного контура привода ГН
Проектирование
замкнутого по скорости привода подразумевает выбор усилительных устройств,
корректирующих и сглаживающих устройств, обеспечивающих наилучшие динамические
характеристики (точность, диапазон регулирования, неравномерность движения на
малых скоростях).
Пользуясь теоретическими положениями, описанными в
литературе [1,7], разработаем структурную и функциональную схемы скоростного контура
привода горизонтального наведения и стабилизации ОЭС.
Функциональная схема
скоростного контура следящего привода ГН представлена на рисунке 9.1.
Совокупность
усилительных, корректирующих и сглаживающих устройств образуют систему
управления приводом.
Функциональная
схема скоростного контура.
Рисунок 9.1.
Структурная схема скоростного контура следящего привода ГН представлена
на рисунке 9.2.
Структурная 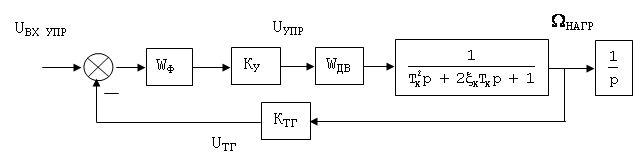
схема скоростного контура.
Рисунок 9.2.
е в пункте 8 найдем передаточную
функцию ЭДВ, находящегося под нагрузкой.
 (9.1)
(9.1)
 (9.2)
(9.2)
где WДВ(р)-
передаточная функция ЭДВ, находящегося под нагрузкой.
Построим для
передаточной функции двигателя логарифми-ческие амплитудную и фазовую частотные
характеристики (ЛАЧХ и ЛФЧХ), по методике изложенной в литературе [3].
LДВ(w)= 20×lg(|WДВ(р)|), (9.3)
где LДВ(w)-
логарифмическая амплитудная частотная характеристика двигателя под нагрузкой.
jДВ(w)= arg(WДВ(р)), (9.4)
где jДВ(w)- логарифмическая фазовая
частотная характеристика двигателя под нагрузкой.
Логарифмические
амплитудная и фазовая частотные характеристики двигателя под нагрузкой
представлены на рисунке 9.3.
Двигатель приводит в
движение нагрузку с помощью вала, нижняя частота собственных колебаний которого
fk = 100 Гц (оговорено в ТЗ). Передаточная функция вала представляет собой
колебательное звено:
 , (9.5)
, (9.5)
где  ,-постоянная времени
колебательного звена, ТК = 1,592 мс;
,-постоянная времени
колебательного звена, ТК = 1,592 мс;
xК – показатель колебательности, xК = 0,1..0,15, примем
xК = 0,125
Система
«двигатель-вал-нагрузка» имеет передаточную функцию:
WДВК(р)= WДВ(р)× WК(р) (9.6)
Построим ЛАЧХ и ЛФЧХ
системы «двигатель-вал-нагрузка»:
LДВК(w)=
20×lg(|WДВК(р)|) (9.7)
где LДВК(w)-
ЛАЧХ системы «двигатель-вал-нагрузка».
jДВК(w)= arg(WДВК(р)) (9.8)
где jДВК(w)- ЛФЧХ системы
«двигатель-вал-нагрузка».
ЛАЧХ и ЛФЧХ системы
«двигатель-вал-нагрузка» представлены на рисунке 9.4.
Чтобы обеспечить запас по фазе системы в пределах 300¸ 600 и максимально-возможную
частоту среза wСР, скорректируем систему «двигатель-вал-нагрузка».
Выберем частоту среза wСР= 80 c-1 (fCP= wСР/2×p, fCP= 12,732
Гц).
Запас по фазе, в данном случае, равен:
Dj = 1800+ jДВК(wСР)=
52,7120.
Чтобы скорректировать систему «двигатель-вал-нагрузка» поднимем её ЛАЧХ
на величину LДВК(wСР), т.е. помножим WДВК(р)
на коэффициент:
 (9.9)
(9.9)
КСР = 185,922
Таким образом, передаточная функция скорректированной системы
«двигатель-вал-нагрузка», будет выглядеть следующим образом:
WДВККОР(р)=
КСР×WДВ(р)× WК(р) (9.10)
Построим ЛАЧХ и ЛФЧХ скорректированной системы
«двигатель-вал-нагрузка» по следующим формулам (соответственно):
LДВККОР(w)=
20×lg(|WДВККОР(р)|) (9.11)
jДВККОР(w)= arg(WДВККОР(р)) (9.12)
ЛАЧХ и ЛФЧХ
скорректированной системы «двигатель-вал-нагрузка» представлены на рисунке 9.5.
Определим коэффициент разомкнутой системы следующим
образом:
 (9.13)
(9.13)
КР =
13,547
Логарифмические амплитудная и фазовая частотные характеристики двигателя
под нагрузкой.
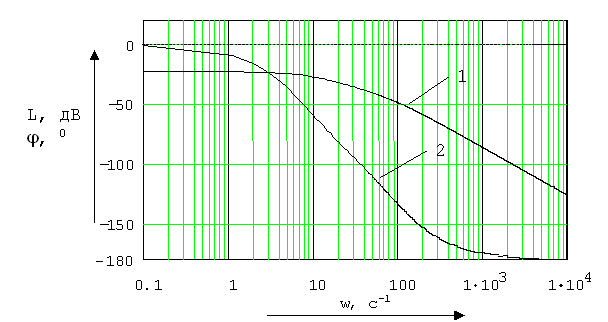
1 – Логарифмические амплитудная частотная характерис-тика двигателя под
нагрузкой LДВ, дВ;
2 - Логарифмические фазовая частотная характеристика двигателя под
нагрузкой jДВ,
0.
Рисунок 9.3.
ЛАЧХ и ЛФЧХ системы
«двигатель-вал-нагрузка».
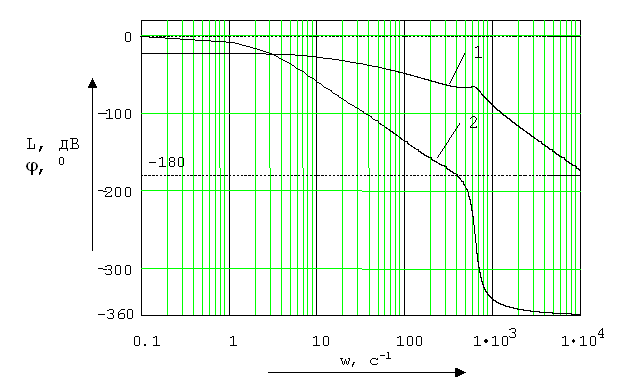
1 – ЛАЧХ системы «двигатель-вал-нагрузка» LДВК, дВ;
2 - ЛФЧХ системы «двигатель-вал-нагрузка» jДВК, 0.
Рисунок 9.4.
ЛАЧХ и ЛФЧХ скорректированной
системы «двигатель-вал-нагрузка»
1 – ЛАЧХ
скорректированной системы «двигатель-вал-нагрузка» LДВККОР, дВ;
2 - ЛФЧХ
скорректированной системы «двигатель-вал-нагрузка» jДВККОР, 0.
Рисунок 9.5.
10. Определение параметров корректирующих устройств
скоростного привода
Полученный
коэффициент разомкнутой системы мал, и в дальнейшем система не будет
удовлетворять статическим и динамическим требованиям. Чтобы увеличить коэффициент
разомкнутой системы добавим в систему корректирующее устройство – фильтр. Вид
передаточной функции фильтра и её параметров выберем исходя из тех же требований:
обеспечение запаса по фазе разомкнутой системы в пределах 300¸600 и
максимально-возможной частоты среза wСР.
Следуя вышеописанному выбираем
фильтр со следующей передаточной функцией:
 , (10.1)
, (10.1)
со следующими
параметрами:
Т1= 0,3 с,
Т2= 0,2 с, Т3= 1 с.
Таким образом, вид передаточной
функции разомкнутой системы «фильтр-двигатель-вал-нагрузка» примет следующий
вид:
WДВКФ(р)=
КСР×WДВ(p)×WK(p)×WФ(р) (10.2)
Построим ЛАЧХ и ЛФЧХ системы
«фильтр-двигатель-вал-нагрузка» по следующим формулам (соответственно):
LДВКФ(w)=
20×lg(|WДВКФ(р)|) (10.3)
jДВКФ(w)= arg(WДВКФ(р)) (10.4)
ЛАЧХ и ЛФЧХ системы
«фильтр-двигатель-вал-нагрузка» представлены на рисунке 10.1.
Так как частота среза
уменьшилась, то необходимо её увеличить до прежнего уровня (wСР=70 с-1),
т.е. домножить передаточную функцию разомкнутой системы на коэффициент  , КФ =
16,622.
, КФ =
16,622.
Теперь запас устойчивости системы
на частоте среза равен:
DjСК = 1800 + jДВКФ(wСР)= 48,1220
(см. рисунок 10.1), что
вполне допустимо.
Окончательный вид
передаточной функции разомкнутого скоростного контура привода ГН имеет
следующий вид:
WРАЗСК(р)=
КСР×КФ×WДВ(p)×WK(p)×WФ(р) (10.5)
Построим ЛАЧХ и ЛФЧХ разомкнутого скоростного контура
привода ГН по следующим формулам (соответственно):
LРАЗСК(w)=
20×lg(|WРАЗСК(р)|) (10.6)
jРАЗСК(w)= arg(WРАЗСК(р)) (10.7)
ЛАЧХ и ЛФЧХ разомкнутого скоростного контура привода
ГН представлены на рисунке 10.2.
ЛАЧХ и ЛФЧХ системы
«фильтр-двигатель-вал-нагрузка».
1 – ЛАЧХ системы «фильтр-двигатель-вал-нагрузка» LДВКФ, дВ;
2 - ЛФЧХ системы «фильтр-двигатель-вал-нагрузка» jДВКФ, 0.
Рисунок 10.1.
Запас устойчивости системы по фазе на частоте среза
равен:
DjСК = 1800 + jРАЗСК(wСР)= 48,1220
(см. рисунок 10.2).
Запас устойчивости по
амплитуде скоростного контура:
DCK= -LРАЗСК(w180)=
20,415 дВ,
где w180-
частота, при которой jРАЗСК= -1800 ,
что вполне допустимо.
Коэффициент
разомкнутого скоростного контура равен:
 , (10.8)
, (10.8)
КРСК = 119,879.
Передаточная функция
скоростного контура следящего привода (замкнутой системы) определяется
следующим выражением:
 (10.9)
(10.9)
ЛАЧХ и ЛФЧХ
разомкнутого скоростного
контура привода ГН.
1 – ЛАЧХ разомкнутого
скоростного контура привода ГН LРАЗСК, дВ;
2 - ЛФЧХ разомкнутого
скоростного контура привода ГН
jРАЗСК, 0.
Рисунок 10.2.
Построим логарифмические
амплитудную и фазовую частотные характеристики замкнутого скоростного контура
по следующим формулам (соответственно):
LЗСК(w)=
20×lg(|WЗСК(р)|) (10.10)
jЗСК(w)= arg(WЗСК(р)) (10.11)
Логарифмические
амплитудная и фазовая частотные характеристики замкнутого скоростного контура
представлены на рисунке 10.3.
Логарифмические
амплитудная и фазовая частотные характеристики замкнутого скоростного контура
1 – Логарифмические амплитудная частотная характерис-тика замкнутого
скоростного контура LЗСК, дВ;
2 - Логарифмические фазовая частотная характеристика замкнутого
скоростного контура jЗСК,
0.
Рисунок 10.3.
11. Формирование контура наведения и стабилизации с
определением параметров корректирующих устройств
Определим требования,
предъявляемые контуру наведения и стабилизации (позиционного контура):
1.
максимум
частоты среза разомкнутого позиционного контура;
2.
запас по фазе
разомкнутого контура 300¸600;
3.
условие
вхождения ЛАЧХ разомкнутого позиционного контура в разрешенные зоны.
Прежде чем начать формирование позиционного контура
необходимо построить запретные зоны, в которые должна входить логарифмическая амплитудная
частотная характеристика разомкнутого позиционного контура.
Для этого определим положение контрольной точки. Из
соотношений (4.4) и (4.5) получим:
 (11.1)
(11.1)
где wКТ –
контрольная частота, wКТ = 0,78 с-1;
ТКТ = 1/wКТ (11.2)
где ТКТ –
постоянная времени контрольной точки, ТКТ=1,282 с;
 (11.3)
(11.3)
где АДОП –
коэффициент разомкнутой системы на контрольной
точке, АКТ
= 1,538 рад.
Передаточная функция запретной зоны определяется передаточной
функцией следующего вида:
 , (11.4)
, (11.4)
где d– величина ошибки слежения, мрад;
ККТ = АКТ/d - коэффициент.
Определим ККТ
для нескольких ошибок слежения:
-
ошибка d = 0,5 мрад
ККТ0.5 =
3077;
-
ошибка d = 1 мрад
ККТ1 =
1538;
-
ошибка d = 4 мрад
ККТ4 =
384,615.
Запретные зоны будут
определяться ЛАЧХ от передаточной функций запретных зон:
LЗЗd(w)= 20×lg(|WЗЗd(р)|) (11.5)
Графики запретных зон
представлены на рисунке 11.1.
Для того чтобы ЛАЧХ
позиционного контура вошла в необходимую зону необходимо в контур ввести
фильтр.
Управляющий сигнал в позиционном контуре
обрабатывается ЦВУ. Частота опроса (дискретизации) ЦВУ fd = 100 Гц. ЦВУ
представляет собой звено дискретизации, которое при расчетах мы заменим на
звено чистого запаздывания. Величина запаздывания, которое ЦВУ вносит в систему
определяется следующим выражением:
 , t = 3,183×10-3
c.
, t = 3,183×10-3
c.
Структурная схема
позиционного контура представлена на рисунке 11.2.
Запретные зоны
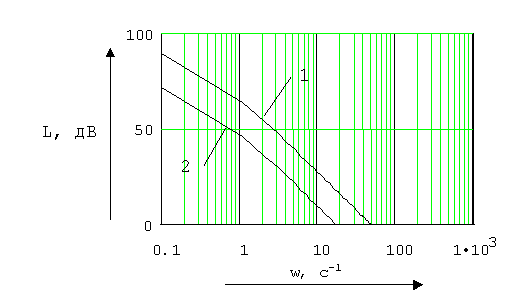
1 – ЛАЧХ
запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
2 - ЛАЧХ
запретной зоны ошибки 4 мрад, LЗЗ4, дВ.
Рисунок 11.1.
Параметры фильтра
выбираем исходя из тех же соображе-ний, которые были описаны выше (максимум
частоты среза позиционного контура, запас по фазе разомкнутого контура 300¸600) и дополнительно
добавляется условие вхождения в разрешенные зоны (см. рисунок 11.1.).
Структурная схема
позиционного контура
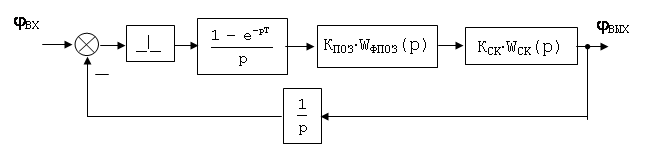
Рисунок 11.2.
Выберем частоту среза
позиционного контура wСРПОЗ= 35 c-1 (fCPПОЗ= wСР/2×p, fCPПОЗ= 5,57 Гц).
Передаточная функция
фильтра позиционного контура будет иметь следующий вид:
 , (11.6)
, (11.6)
где КПОЗ =
559,760 , ТФ = 0,07 с, ТКТ = 1,282 с.
Т.о. передаточная
функция разомкнутого позиционного контура примет вид:
WРПОЗ(w)=
е-р×t×WФПОЗ(w)×WЗСК(w) (11.7)
Построим
логарифмические амплитудную и фазовую частотные характеристики разомкнутого
позиционного контура по следующим формулам (соответственно):
LРПОЗ(w)=
20×lg(|WРПОЗ(р)|) (11.8)
jРПОЗ(w)= arg(WРПОЗ(р)) (11.9)
Логарифмические
амплитудная и фазовая частотные характеристики разомкнутого позиционного
контура представлены на рисунке 11.3.
Запас устойчивости
системы по фазе на частоте среза равен:
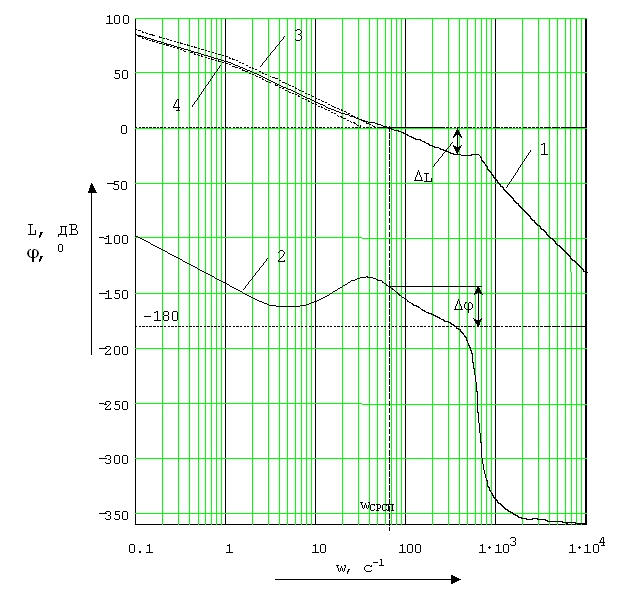
DjСК = 1800 + jРПОЗ(wСРПОЗ)= 54,3070
(см. рисунок 11.3.).
Запас устойчивости
по амплитуде позиционного контура:
DLCK= -LРАЗСК(w-180)=
12 дВ,
где w-180-
частота, при которой jРПОЗ= -1800 ,
что вполне допустимо.
Коэффициент
разомкнутого позиционного контура равен:
 , (11.10)
, (11.10)
КРПОЗ = 344,137.
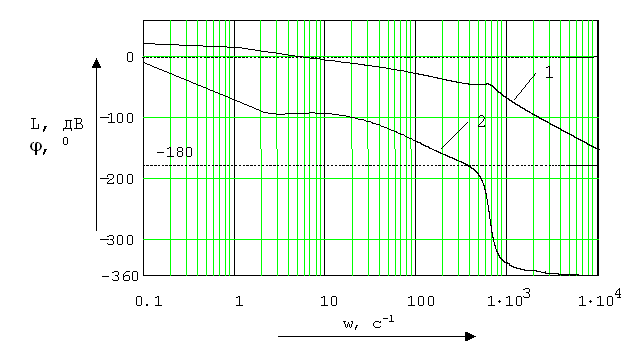
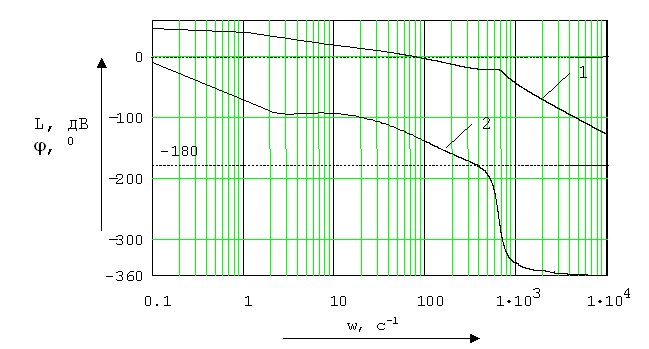
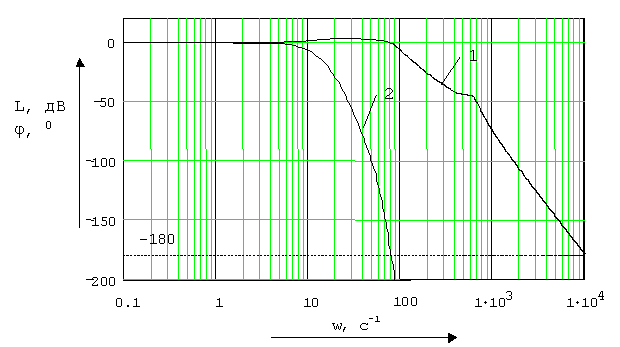
Логарифмические амплитудная и фазовая частотные характеристики разомкнутого
позиционного контура
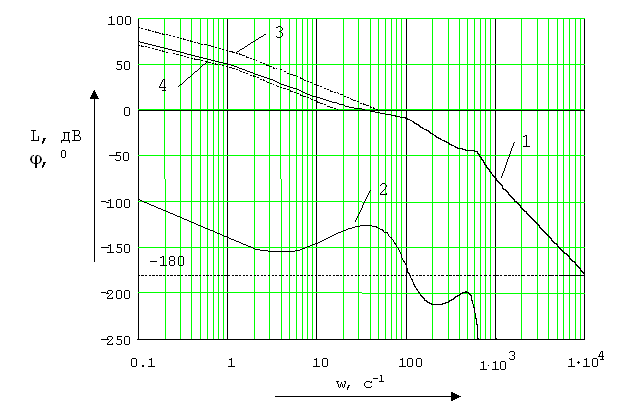
1 – ЛАЧХ разомкнутого
позиционного контура LРПОЗ, дВ;
2 - ЛФЧХ разомкнутого
позиционного контура jРПОЗ, 0;
3 – ЛАЧХ
запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
4 - ЛАЧХ
запретной зоны ошибки 4 мрад, LЗЗ4, дВ.
Рисунок 11.3.
Передаточная функция позиционного контура следящего
привода (замкнутой системы) определяется следующим выражением:
 (11.11)
(11.11)
Построим
логарифмические амплитудную и фазовую частотные характеристики замкнутого
позиционного контура по следующим формулам (соответственно):
LЗПОЗ(w)=
20×lg(|WЗПОЗ(р)|) (11.12)
jЗПОЗ(w)= arg(WЗПОЗ(р)) (11.12)
Логарифмические амплитудная и фазовая частотные
характеристики замкнутого позиционного контура представлены на рисунке 11.4.
Логарифмические амплитудная и фазовая частотные характеристики замкнутого
позиционного контура
1 – ЛАЧХ замкнутого
позиционного контура LЗПОЗ, дВ;
2 - ЛФЧХ замкнутого
позиционного контура jЗПОЗ, 0.
Рисунок 11.4.
Как видно из полученных результатов ЛАЧХ разомкнутого позиционного
контура соответствует предъявленным выше требованиям к характеристикам
позиционного контура. Но ЛАЧХ разомкнутого позиционного контура входит в зону
соответствующую ошибке 4 мрад, что является не приемлемым для систем данного
класса точности. Чтобы обеспечить ошибку слежения меньшую или равную 1 мрад,
достаточную дли систем сопровождения, введем в систему компенсирующую
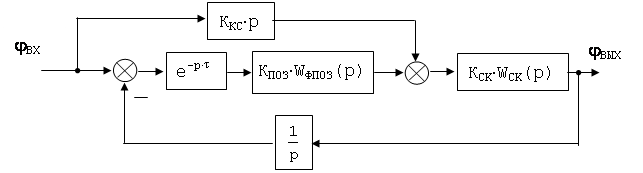
положительную обратную связь. Т.о. структурная схема проектируемой следящей
системы примет следующий вид (см. рисунок 11.5.).
Следуя рекомендациям в литературе [3] эквивалентная передаточная функция
скомпенсированного замкнутого позиционного привода будет иметь следующий вид:
 (11.13)
(11.13)
Структурная схема скомпенсированного позиционного контура
Рисунок 11.5.
Параметры
компенсирующей связи выбираем из соображений требований к характеристикам
позиционного контура. Т.о. ККС = 800.
Построим ЛАЧХ и ЛФЧХ
скомпенсированного замкнутого позиционного контура:
LЗСС(w)=
20×lg(|WЗСС(р)|) (11.14)
где LЗСС(w)-
ЛАЧХ скомпенсированного позиционного контура.
jЗСС(w)= arg(WЗСС(р)) (11.15)
где jЗСС(w)- ЛФЧХ скомпенсированного
позиционного контура.
ЛАЧХ и ЛФЧХ
скомпенсированного замкнутого позиционного контура представлены на рисунке
11.6.
Выразим передаточную
функцию разомкнутого скомпенсированного позиционного контура из передаточной
функции замкнутого контура. Получим следующее выражение:
 (11.16)
(11.16)
Логарифмические амплитудная и фазовая частотные характеристики скомпенсированного
замкнутого позиционного контура
1 – ЛАЧХ
скомпенсированного замкнутого позиционного контура привода ГН LЗСС,
дВ;
2 - ЛФЧХ
скомпенсированного замкнутого позиционного контура привода ГН jЗСС, 0.
Рисунок 11.6.
Построим ЛАЧХ и ЛФЧХ
скомпенсированного разомкнутого позиционного контура:
LРСС(w)=
20×lg(|WРСС(р)|) (11.17)
где LРСС(w)-
ЛАЧХ скомпенсированного позиционного контура.
jРСС(w)= arg(WРСС(р)) (11.18)
где jРСС(w)- ЛФЧХ скомпенсированного
позиционного контура.
ЛАЧХ и ЛФЧХ
скомпенсированного разомкнутого скомпенсированного позиционного контура на
рисунке 11.7.
Запас устойчивости
системы по фазе на частоте среза равен:
DjСC = 1800 + jРСС(wСРПОЗ)= 34,5670
(см. рисунок 11.7.).
Запас устойчивости
по амплитуде позиционного контура:
DLCC= -LРСС(w-180)=
24 дВ,
где w-180-
частота, при которой jРСС= -1800 ,
что вполне допустимо.
Коэффициент
разомкнутого позиционного контура равен:
 , (11.19)
, (11.19)
КРСС = 1336.
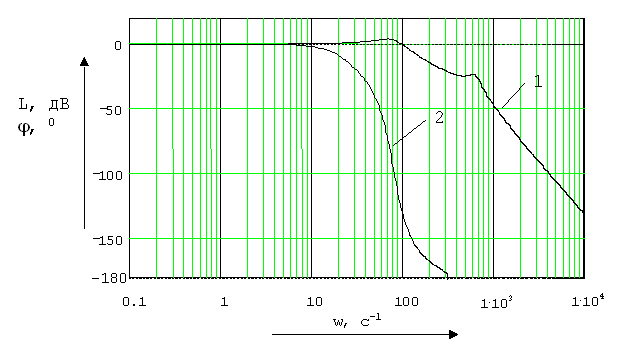
И так, благодаря введению в структуру привода
компенсирующей связи, мы добились того, что ЛАЧХ разомкнутого позиционного
контура (разомкнутой следящей системы) входит в зону соответствующую ошибке менее
1 мрад, что является приемлемым для систем данного класса точности. Кроме того,
частота среза следящей системы увеличилась до wСР= 69,3 с-1
(fСР= 11,03 Гц), т.е. увеличилась полоса пропускания системы. На
этом проектирование структуры привода горизонтального канала наведения и стабилизации
ОЭС закончено.
Окончательный вид структурной схемы математической
модели привода ГН и его функциональная схема представлены в приложениях 2 и 3 соответственно.
Параметры структурной схемы математической модели привода ГКНиС представлены ниже:
КСК = 28,468 Т1
= 0,3 с RC = 1,425 Ом
КДВ = 4,21 Т2 = 1
с ТЭЛ = 0,01 с
КПОЗ = 344,14 Т3
= 0,2 с ТМ = 1,745 с
ККС = 800 ТФ
= 0,07 с СЕ = 13,6 Вс
ТК = 1,6 мс ТКТ
= 1,282 с СМ = 6 Вс
xК = 0,125 t = 3,18 мс
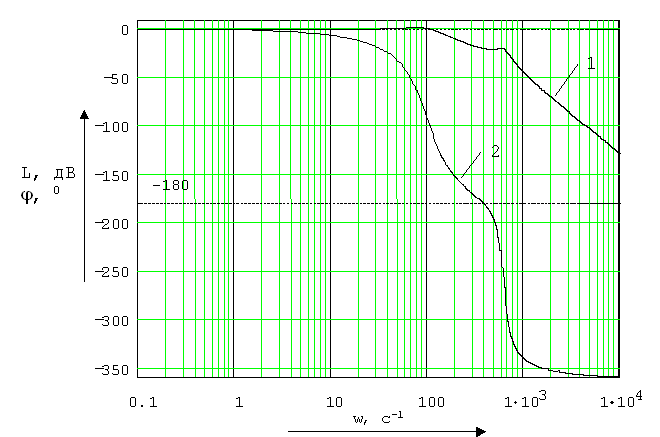
Логарифмические амплитудная и фазовая частотные
характеристики скомпенсированного разомкнутого позиционного контура
1 – ЛАЧХ
скомпенсированного разомкнутого позиционного контура привода ГН LРСС,
дВ;
2 - ЛФЧХ
скомпенсированного разомкнутого позиционного контура привода ГН jРСС, 0;
3 – ЛАЧХ
запретной зоны ошибки 0,5 мрад, LЗЗ0.5, дВ;
4 - ЛАЧХ
запретной зоны ошибки 1 мрад, LЗЗ1, дВ.
Рисунок 11.7.
12. Определение точностных характеристик
Для определения
точностных характеристик воспользуемся САПР MathLab 5.0. Смоделируем
структурную схему матмодели горизонтального канала наведения и стабилизации
ОЭС, представленную в приложении 2 и вышеописанными параметрами.
Рассмотрим реакцию
системы на два различных входных воздействия:
1.
Ступенчатое
входное воздействие;
2.
Гармонический
сигнал.
Реакция системы на ступенчатое входное воздействие
(разгонная характеристика) величиной jВХ
= 1 рад
представлена на рисунке 12.1. Определим по этой характеристике основные параметры
переходного процесса:
1. Время переходного
процесса – время вхождения переходного процесса в зону 5% - го отклонения от
входного воздействия.
ТПП =
0,025 с.
2. Величина
перерегулирования – процентное выражение максимального отклонения переходного
процесса от установившегося значения переходного процесса:
 (12.1)
(12.1)
где hMAX(t)–
максимальное значение переходного процесса;
hУСТ(t)-
установившееся значение переходного процесса;
t - время переходного
процесса.
Величина
перерегулирования s = 2,5%.
Реакция системы на
гармонический сигнал jВХ=А×sin(w×t), где А=10 и w=1 Гц
представлена на рисунке 12.2.
Из рисунка 12.2
видно, что следящая система входит в установившийся режим через 0,4 с.
13. Разработка конструкции и технология
изготовления БУ следящего привода
13.1. Конструкция платы БУ привода
Плата ячейки 3 БУ привода горизонтального канала
наведения и стабилизации ОЭС разработана для установки в прямоугольный
металлический корпус. Габаритные размеры платы указана на сборочном чертеже.
Плата изготовлена из текстолита СФ-2-35 (ГОСТ 10316 - 88) толщиной 2 мм, имеет
двухстороннюю разводку печатных проводников, отверстия металлизированные. В
углах платы имеется четыре отверстия для направляющих, диаметром 3 мм. В
корпусе предполагается наличие пластмассовых направляющих штырей, которые
входят в отверстия платы. Корпус изготовлен из аллюминия ГОСТ 2476 - 83. В
корпусе плату удерживают пластмассовые защелки, на днище. На верхней части
корпуса предполагаются металлические штыри которые в закрытом состоянии плотно
прижимают плату к днищу. Такой метод обеспечивает надежное крепление и технологичную
сборку изделия.
Элементы устанавливаются на плату с одной стороны,
используемые микросхемы имеют пластмассовые корпуса с прямоугольными выводами
(корпуса 201.14-3, 201.16-6), устанавливаемые на печатные платы с односторонним
или двусторонним расположением печатных проводников в металлизированные
отверстия с зазором, который обеспечивается конструкцией выводов и планарные
корпусами с отформованными выводами (корпуса 401.14-3,4018.24-1),
устанавливаемые на платы с односторонним или двусторонним расположением
проводников следующими способами: вплотную на печатную плату, с зазором 0,3 мм
или вплотную на прокладку.
Разработка печатной платы БУ
Печатная плата разрабатывается с помощью САПР P-СAD,
версии 3.0. Необходимо сказать, что ручной метод конструирования печатных плат,
особенно многослойных, представляет весьма трудоемкий процесс, а в отдельных
случаях просто неприемлем. Ручной метод, это метод проб и ошибок. Как правило,
требуется, чтобы всю работу по конструированию выполнял один человек. Даже
опытные конструкторы проектируют плату средней сложности в течении нескольких
недель, допуская при этом ошибки. Машинный метод застрахован от ошибок, а также
снимает рутинные операции перебора вариантов, но квалификация специалиста все
же требуется. Машинный метод предоставляет множество сервисных возможностей,
например можно точно замерить длину проводника на плате, оптимизировать плату
по какому ни будь параметру, например минимизировать количество переходных
отверстий и д.р.
Основные габариты печатной платы определяются
рациональной компоновкой на них навесных радиоэлементов, входящих в законченную
схему устройства. Следует учитывать, что печатная плата выполняет роль шасси,
поэтому необходимо обеспечить ее прочность. Рекомендуемые отношения сторон:
1:1; 1:2; 2:3; 2:5 (ГОСТ 101317 - 79). В соответствии с изложенным выше
проектируемая печатная плата имеет размер 116,25x88,75 по плотности проводящего
рисунка печатная плата относится к классу (с минимально допустимой шириной
проводника и минимальными расстоянием между элементами проводящего рисунка 0,3
мм).
В соответствии с ГОСТ 23751-86 точность печатного
монтажа соответствует первому классу точности.
Параметр монтажа:
– Ширина проводника 0,3 мм;
– Расстояние между проводниками 0,3
мм;
– Ширина пояса металлизации 0,3 мм;
– Отношение диаметра наименьшего
металлизированного отверстия к толщине печатной платы 0,4.
– Отверстия диаметром 0,8 мм. имеют
максимально допустимое отклонение  0,12 мм.
0,12 мм.
Предельное рабочее напряжение между проводниками с
расстоянием 0,3 мм лежащими в одной плоскости, для фольгированного
стеклотекстолита составляет 300В.
Размещение элементов на плате выполняется условными
группами, т.е. цифровая часть схемы сгруппирована в одном месте, также выделена
аналоговая часть схемы. Так удается достичь кратчайших связей между элементами
схемы.
Отверстия на печатной плате располагаются таким
образом, чтобы наименьшее расстояние между внешним контуром платы и краем
отверстия было не менее толщины платы, т.е. не менее 2 мм.
Отверстия на печатной плате размещены в соответствии
с координатной сеткой по ГОСТ 10316 - 78 с шагом 1,25 мм.
Трассировка печатной платы выполнена методом север-юг,
запад-восток, что минимизирует влияние токоведущих проводников верхнего и
нижнего слоев друг на друга. Особенно эти помехи нежелательны в цифровой части
схемы из-за возможных сбоев в работе устройства.
Земляные проводники выполнены шириной 0,75 мм, и
подводятся к земляному полигону расположенному по периметру платы для
минимизации сопротивления. Минимизировать длину земли удается за счет того, что
она не тянется по всей плате, а каждый отвод начинается с полигона. При попадании
контактной площадки в зону полигона, вокруг площадки используются тепловые
барьеры - это секторные вырезы вокруг контактной площадки. Эти барьеры
предотвращают отток тепла во время пайки в земляной полигон и в тоже время
растекание припоя по полигону.
Разводка платы выполняется поэтапно. Сначала разводим
цепи питания т.е. землю и +5В. В этом случае имеем минимальную длину
проводников питания т.к. эти цепи имеют приоритет.
Цепь +5В выполняется шириной 0,75 мм.
Необходимо определить падение на постоянном токе в
цепях питания и земли. Определим длину этих цепей в P-CAD.
 мм.
мм.
Значение сопротивления печатного проводника длинной
1 м.
 Ом/м.
Ом/м.
Сопротивление проводника по постоянному току равно:
 (13.1)
(13.1)
 Ом.
Ом.
В ТУ на ИС указывается максимально возможное
отклонение питающего напряжения от номинала не более 10 %.
где  - номинальное напряжение питания
равное 5В.
- номинальное напряжение питания
равное 5В.
 (13.2)
(13.2)
 В
В

Условие выполняется, падение напряжения на питающих
цепях не превышает допустимого значения, следовательно, данная ширина
проводника принимается.
Число слоев платы зависит от сложности электрической
схемы, а в частности от числа проводников. Как говорилось выше разводка платы
осуществляется машинным способом. Попытки развести плату в один слой не дали
положительных результатов, конечно с сохранением необходимой ширины
проводников. Часть схемы остается недоразведенной. Двухслойная плата разводится
хорошо и соединения получаются более оптимальные, короткие.
После получения разведенной печатной платы с помощью
программной утилиты проверяются зазоры между трассами, контактными площадками.
Далее получаем управляющий файл для фотоплоттера с
помощью которого в последствии получают фотошаблон причем на две стороны платы.
Также с помощью программной утилиты получаем управляющий
файл для сверлильного станка с ЧПУ.
На этом цикл разработки печатной платы закончен.
Толщина печатной платы равна 2 мм в соответствии с
выбранным классом точности печатного монтажа и учетом способа изготовления
исходя из электрических и механических требований.
В качестве материала для изготовления печатной
платы, выбран стеклотекстолит, облицованный с двух сторон медной фольгой. Марка
фольгированного диэлектрика толщиной 35 мкм. СФ-2-35 (ГОСТ 10316 - 88).
Установка элементов производится в соответствии с
ОСТ 4.ГО.010.030 - 81.
Электромонтаж выполняется в соответствии с
электрической принципиальной схемой устройства.
После пайки и регулировки предусмотрено покрытие
лаком КО - 961П, время высыхания которого 4 часа при температуре 20°С.
Современные промышленные способы изготовления
печатных плат основаны на использовании фольгированных диэлектриков, т.е. на
получении токопроводящего рисунка схемы методом травления.
При изготовлении двусторонних печатных плат, главным
образом, используется метод фотопечати с последующим травлением, т.е. фотохимический
метод. Отверстия же в плате металлизируются электрохимическим методом. Таким
образом метод изготовления печатных плат получил название комбинированный.
В свою очередь комбинированный метод имеет две разновидности:
– позитивный вариант;
– негативный вариант.
При негативном методе экспонирование рисунка
производится с фотонегатива, после экспонирования выполняется травление
рисунка, а затем сверление отверстий платы. Металлизация отверстий ведется в
специальных контактирующих приспособлениях.
При позитивном методе экспонирование рисунка
производится с фотопозитива. После экспонирование ведется сверление и
металлизация отверстий. Затем рисунок схемы и металлический слой в отверстиях
защищаются слоем гальванического серебра или другого металла, стойкого к
травителю меди, после чего производят травление незащищенной меди.
Для изготовления печатной платы БУ привода из стеклотекстолита
СФ - 2 - 35 применяем комбинированный позитивный метод.
Метод позволяет изготавливать печатные платы с
повышенной плотностью монтажа, высокими электрическими параметрами и высокой
прочности сцепления проводников. Он рекомендуется при изготовлении печатных
плат для аппаратуры, работающей в жестких условиях эксплуатации. Метод является
предпочтительным при новых разработках.
Пайку размещенных в соединительные места элементов
производят припоем ПОС - 61 (ГОСТ 21390 - 81) с применением флюса КЭ, при температуре
паяльника 240°С. Данный припой является
легкоплавким, а флюс для низкотемпературной пайки.
Расчет теплового режима платы
Сразу необходимо заметить, что устройство является
микромощным, это видно по потребляемому току  мА, при напряжении питания
мА, при напряжении питания  В. В силу
этого нет смысла говорить о каком либо варианте принудительного охлаждения.
Достаточно обеспечить естественное охлаждение платы.
В. В силу
этого нет смысла говорить о каком либо варианте принудительного охлаждения.
Достаточно обеспечить естественное охлаждение платы.
К естественному охлаждению относится охлаждение
наружной средой поверхности платы и перенос внутренней средой теплоты от
нагретой зоны к корпусу устройства или вентиляция протекающим через полость
корпуса окружающим воздухом.
Рассчитаем мощность выделяемую пятивольтовой частью
схемы:
 (13.3)
(13.3)
 Вт.
Вт.
На плате установлен стабилизатор напряжения посредством
которого, на основную часть схемы подается напряжение +5В. На вход этого стабилизатора
подается напряжение  В. Рассчитаем мощность рассеиваемую
на этой микросхеме:
В. Рассчитаем мощность рассеиваемую
на этой микросхеме:
 Вт.
Вт.
Суммарная мощность рассеиваемая элементами платы:
 (13.4)
(13.4)
 Вт.
Вт.
13.3. Расчет показателей надежности БУ следящего привода
Надежность есть свойство аппаратуры сохранять свои
выходные характеристики в определенных пределах при заданных условиях эксплуатации.
Характеризовать надежность определенного класса
элементов или систем можно:
– вероятностью их безотказной
работы  ;
;
– средним временем исправной работы
Т;
– отказов L(t);
– частотой отказов A(t);
– коэффициентами готовности;
– ремонтопригодности и т.д.
Данный расчет учитывает влияние на надежность только
количество и типы принимаемых элементов и основывается на допущении, что все элементы
включены последовательно и подвержены внезапным отказа.
Для определения надежности изделия необходимо знать:
1. Вид соединения элементов;
2. Тип элементов, входящих в изделие
и количество элементов данного типа;
3. Величины интенсивности отказов
элементов  ,
входящих в изделие.
,
входящих в изделие.
Все элементы схемы ячейки 3 БУ привода горизонтального
канала наведения и стабилизации ОЭС сведены в табл. 13.1.

Среднее время безотказной работы блока можно
рассчитать по формуле:
 (13.5)
(13.5)
где L - интенсивность
отказов БУ следящего привода.
 ч.
ч.
Таблица 13.1.
| Наименование
элементов |
Количество
элементов  ,
штук ,
штук
|
Интенсивность
отказа одного элемента 
|
Произведение
|
| Микросхемы |
5 |
0,1 |
0,5 |
| Резисторы |
46 |
0,25 |
11,5 |
| Конденсаторы |
20 |
0,15 |
3 |
| Стабилитроны |
2 |
0,6 |
1,2 |
| Розетка |
1 |
0,25 |
0,25 |
| Пайки |
295 |
0,03 |
8,85 |
| Всего |
|
25,3 |
Тогда вероятность безотказной работы:
 (13.6)
(13.6)

Данный расчет справедлив для систем, работающих без
восстановления. Ячейка 3 БУ следящего привода относится к восстанавливаемым устройствам,
по этому необходимо рассчитать наработку на отказ.
Будем считать, что восстановление модуля за допустимое
время будет осуществляться с вероятностью восстановления за  :
:
тогда время наработки
на отказ T равно:
 (13.7)
(13.7)
 ч.
ч.
Для повышения надежности модуль должен подвергаться
периодически профилактическим мероприятиям. Зададимся числом профилактик М за
отрезок равный наработке на отказ М=8. Тогда период профилактики  :
:
 (13.8)
(13.8)
 ч.
ч.
Переведем период профилактики в календарный период:
 (13.9)
(13.9)
 лет.
лет.
С учетом отклонений условий эксплуатации от
нормальных, период профилактики может быть уменьшен в К - раз:
 (13.10)
(13.10)
где:
 (13.11)
(13.11)
где:  - поправочный
коэффициент отклонения температуры от нормальных условий;
- поправочный
коэффициент отклонения температуры от нормальных условий;
 - коэффициент отклонения
нагрузки элементов;
- коэффициент отклонения
нагрузки элементов;
 - коэффициент отклонения
давления;
- коэффициент отклонения
давления;
 - коэффициент отклонения
влажности;
- коэффициент отклонения
влажности;
 - коэффициент отклонения
других параметров.
- коэффициент отклонения
других параметров.

Период профилактических мероприятий составит:
 г.
г.
Для проведения профилактических мероприятий выбираем
систему профилактики с полным отключением устройства. В случае отказа устройство
также отключается и передается для ремонта квалифицированному персоналу.
Необходимые профилактические мероприятия: визуальный
осмотр платы на предмет механических повреждений, поиск потемневших элементов,
нарушение паек, чистка (протирка ветошью смоченной в изопропиловом спирте)
контактов разъемов от окислов, контроль целостности изоляции проводов.
14. Охрана труда и окружающей среды
Постоянное улучшение условий и охраны труда, его
научной организации, сокращение и полное вытеснение тяжелого физического труда
может быть достигнуто на основе комплексной механизации и автоматизации производственных
процессов во всех отраслях народного хозяйства и дальнейшего совершенствования
мер и средств защиты окружающей среды.
В настоящем разделе производится анализ вредных и
опасных производственных факторов связанных с производством БУ привода ГН,
предлагаются мероприятия, необходимые для достижения нормативных значений и для
обеспечения безвредных условий работ. Рассчитываются параметры освещения и
вентиляции. Производится оценка производства с точки зрения пожарной опасности
и вреда, приносимого окружающей среде. Предлагаются мероприятия по их снижению
и устранению.
14.1. Охрана труда
14.1.1.
Анализ вредных и опасных производственных факторов.
В цехе нанесения фоторезиста на заготовки печатных
плат (ПП) находится 8 установок, в процессе работы которых в воздух цеха
выделяются этиловый спирт и аммоний двухромовокислый (эти компоненты входят в состав
фоторезиста). В силу этих причин воздух рабочей зоны не соответствует ГОСТ
12.1.005-88.
В установках используются двигатели, с помощью
которых осуществляется конвейерное продвижение заготовок ПП в ванне с
фоторезистом. В силу небольшой мощности и конструкции подвеса двигателей
уровень шума от оборудования не превышает максимально допустимого по ГОСТ
12.1.003-83.
При работе с электрооборудованием на человека
оказывают влияние, генерируемые электроникой, магнитные поля промышленных
частот.
Это излучение отрицательно влияет на развитие клеток,
повышают опасность возникновения онкологических заболеваний. В оборудовании с
рассматриваемого цеха, электронные управляющие блоки и двигатели находятся в
металлических кожухах и относительно удалены от места оператора. Поэтому
уровень магнитных полей не представляет опасности для человека.
Цех нанесения фоторезиста на ПП представляет собой
помещение размером 40´25 м. и высотой 6 м. В помещении
имеются 6 оконных проемов размером 2,5´3,2
м. и две двери размером 2´2,5 м. В цехе размещены 8 установок
размером 6´5,55 м., которые обслуживаются
10-ю операторами. Установка представляет собой комплекс состоящий из ванны в
которой находится собственно фоторезист. Посредствам конвейера, заготовки ПП
погружаются в ванну, после того как заготовка покидает ванну она оказывается покрыта
фоторезистом. Все параметры оборудования (скорость конвейера, температура
фоторезиста и др.) поддерживаются системой автоматического регулирования.
Оператор имеет доступ к этим параметрам, посредствам пульта управления. На рис.
14.1 представлен эскиз цеха.
Площадь одной установки:

Площадь занимаемая оборудованием:

Площадь цеха:

Свободная площадь:

Площадь на одного человека:
Объем занимаемый оборудованием:

Объем цеха:

Объем на одного человека:

Эскиз цеха нанесения фоторезиста на ПП
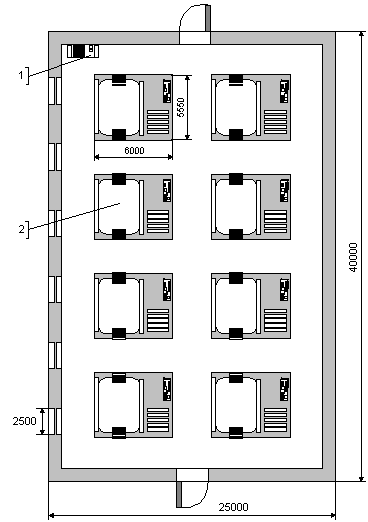
1
- Щит для
отключения электричества (1400´700´1800);
2
- Установка
нанесения фоторезиста на ПП (6000´5550´1700).
Рисунок 14.1.
Согласно требованиям СН 245-71 производственное
помещение соответствует санитарным нормам.
14.1.3.
Микроклиматические условия производственного помещения и вентиляция.
Микроклимат производственных помещений определяется
следующими параметрами:
– температура воздуха  ,°С;
,°С;
– относительная влажность  , %;
, %;
– скорость движения воздуха  , м/с;
, м/с;
– температура окружающих
поверхностей.
Согласно требованиям
ГОСТ 12.1.005-88 в соответствии категорией работ средней тяжести IIа, в данном
помещении должны обеспечиваться следующие условия труда (таблица 14.1).
Таблица 14.1.
Оптимальные и допустимые
параметры микроклимата
| Период |
Температура°С |
Относит.
влажн. % |
Скор.
движ.
м/с.
|
|
|
Оптим. |
Допустимая
граница |
|
|
|
|
|
|
|
верхняя |
нижняя |
|
|
|
|
|
|
|
На
рабочих местах |
опт. |
доп. |
опт. |
доп. |
|
|
|
пост. |
не
пост. |
пост. |
не
пост. |
|
|
|
|
| Холодный |
18-20 |
23 |
24 |
17 |
15 |
40-60 |
75 |
0,2 |
£
0,3 |
| Теплый |
21-23 |
27 |
29 |
18 |
17 |
40-60 |
65 |
0,3 |
0,2-0,4 |
В процессе
эксплуатации технологического оборудования в воздух рабочей зоны попадают
выделения этилового спирта и аммония двухромовокислого. Поэтому необходимо
обеспечить их локальное удаление, а также обеспечить общую вентиляцию цеха для
полного удаления этих вредных веществ.
Рассчитаем количество
этилового спирта испаряющегося с поверхности ванны:
Ширина ванны В=2м,
длина l=3м. Соответственно площадь ванны будет:

С 1 м2 поверхности ванны в час испаряется
70 г этилового спирта, соответственно с 6 м2:
 г/ч
г/ч
Определим необходимый расход удаляемого воздуха:
 (14.1)
(14.1)
где:  - количество
выделяющихся вредностей;
- количество
выделяющихся вредностей;
 и
и  - концентрация вредных веществ в
приточном и удаляемом воздухе.
- концентрация вредных веществ в
приточном и удаляемом воздухе.
Согласно СН 245-71  и
и 
С учетом  - имеем:
- имеем:
 м3/ч
м3/ч
Рассчитаем количество
аммония двухромовокислого испаряющегося с поверхности ванны:
Площадь ванны 
С 1 м2 поверхности ванны в час испаряется
15 г аммония двухромовокислого , соответственно с 6 м2:
 г/ч
г/ч
Определим необходимый расход воздуха:
С учетом  - имеем:
- имеем:
 м3/ч
м3/ч
При одновременном выделении нескольких вредностей
необходимый воздухообмен находят суммированием объемов воздуха необходимого для
удаления каждого из вредных веществ.

 м3/ч
м3/ч
С учетом того, что в цехе работают 8 установок находим
воздухообмен цеха:
 м3/ч
м3/ч
Для того чтобы, сократить
количество вредных веществ попадающих в воздух рабочей зоны необходимо их
локальное удаление. Для этого рекомендуется установить на каждом агрегате
местные активированные отсосы [16]. Эти отсосы активизируют плоскими приточными
струями, которые захватывают окружающий воздух и направляют его к всасывающему
отверстию.
Приточная струя
должна проходить в зоне вредных выделений и направляться к центру всасывающего
отверстия. Скорость этой струи воздуха следует обеспечивать в пределах 1-2 м/с.
Ширину приточной щели не следует делать меньше 5 мм., а щели местного отсоса 50
мм. Скорость приточного воздуха при активированных отсосах у ванн принимают не
более 10 м/с., во избежании образования волн на поверхности жидкости.
Рассчитаем расход
приточного и отсасываемого воздуха бортового активированного отсоса, рис. 14.2.
Бортовой активированный отсос
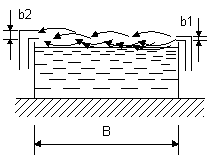
Рисунок 14.2.
Ширина ванны В=2м, длина l=3м.
Щели для подачи и удаления воздуха располагаются
вдоль длинных бортов ванны.
Приточная плоская струя ограничена с одной стороны.
Расстояние от приточного отверстия до критического сечения определяем как:

Осевую скорость приточной струи в критическом
сечении  принимаем
равной 2 м/с.
принимаем
равной 2 м/с.
Среднюю скорость в приточном отверстии  принимаем 6
м/с., тогда ширина приточной щели составит:
принимаем 6
м/с., тогда ширина приточной щели составит:
 (14.2)
(14.2)
Скорость всасывания принимаем в пределах  и принимаем ее
5 м/с, тогда ширина всасывающей щели определяется как:
и принимаем ее
5 м/с, тогда ширина всасывающей щели определяется как:
 (14.3)
(14.3)
Расход приточного воздуха равен:
 (14.4)
(14.4)
 /ч
/ч
Расход отсасываемого воздуха:
 (14.5)
(14.5)
 /ч
/ч
Скорректируем воздухообмен цеха с учетом воздуха
отсасываемого бортовыми активированными отсосами. Эти отсосы обеспечивают
удаление выделяемых вредностей до 80%, следовательно:
 м3/ч
м3/ч
т.е. для общей
вентиляции цеха достаточно обеспечить удаление воздуха  м3/ч.
м3/ч.
По расходу выбираем вентилятор для удаления воздуха
А5090-1 - вентиляторный агрегат типа Ц5-75. Число оборотов и мощность двигателя
выбираем по характеристикам вентилятора. Число оборотов составляет  об/мин,
мощность электродвигателя 0,6 кВт, кпд двигателя
об/мин,
мощность электродвигателя 0,6 кВт, кпд двигателя  . Выбираем марку электродвигателя
- АОЛ2-12-6.
. Выбираем марку электродвигателя
- АОЛ2-12-6.
Для подачи воздуха выбираем вентилятор А2,5100 -
вентиляторный агрегат типа Ц4-60. Число оборотов составляет  об/мин, мощность
электродвигателя 0,12 кВт, кпд двигателя
об/мин, мощность
электродвигателя 0,12 кВт, кпд двигателя  . Выбираем марку электродвигателя
- АОЛ11-4.
. Выбираем марку электродвигателя
- АОЛ11-4.
Одним из важнейших факторов влияющих на
производительность труда является освещенность рабочего места обслуживающего
персонала. В цехе нанесения фоторезиста имеет место система совмещенного освещения
(естественное одностороннее и общее искусственное освещение). Естественный свет
проникает через 6 оконных проемов размером 2,5´3,2
м. Общее искусственное освещение создано люминесцентными лампами. Нормированная
освещенность производственных помещений в соответствии со СНиП 23.05-95
составляет 200 лк.
Произведем расчет общего искусственного освещения
методом коэффициента использования светового потока [16]. Метод позволяет
обеспечить среднюю освещенность поверхности с учетом всех падающих на нее потоков,
как прямых, так и отраженных. Его применяют для расчета общего равномерного
освещения горизонтальных поверхностей.
Коэффициент использования светового потока h равен отношению светового потока, падающего на
расчетную поверхность, ко всему потоку осветительной установки. Он определяется
геометрией помещения, коэффициентами отражения потолка rп, стен rс, расчетной поверхности rр, типом КСС источника света.
Выполняемая зрительная работа характеризуется
следующими параметрами:
фон - средний;
контраст - большой;
размер объекта
различения до 1 мм.
Определяем rп=70%, rс=50%, rр=30%.
Геометрия помещения
учитывается индексом помещения:
 , (14.6)
, (14.6)
где a и b - длина и
ширина помещения, м;
h - расчетная высота
(высота подвеса над расчетной поверхностью), м.
а=40м, b=25м, h=5м.
Тогда подставив значения получим индекс помещения:
Следовательно, по всем полученным величинам
определяем коэффициент использования светового потока
Тип КСС Д-1, h=0,77%.
Необходимый поток каждой лампы определяем по формуле:
 (14.7)
(14.7)
где E - нормативное
значение освещенности, лк;
S - площадь
помещения, м2;
 - коэффициент запаса,
учитывающий снижение светового потока за счет запыленности ламп,
- коэффициент запаса,
учитывающий снижение светового потока за счет запыленности ламп,  ;
;
Z - коэффициент неравномерности,
Z=1,1;
N - число ламп;
 - коэффициент
использования светового потока.
- коэффициент
использования светового потока.
В соответствии со СНиП 23.05-95 минимальное значение
освещенности в данном помещении составляет E=200 лк.
Отсюда получаем:

Выбираем люминесцентную лампу ЛД-80 со световым потоком
Ф=4070 лк.
Имеем 
Выбираем светильник типа ПВЛМ, в котором размещаются
две лампы. Рассчитаем количество светильников:
Размеры светильника: 1150´225´95
мм.
Расположение
светильников в помещении показано на рисунке 14.3.
Расположение искусственного освещения
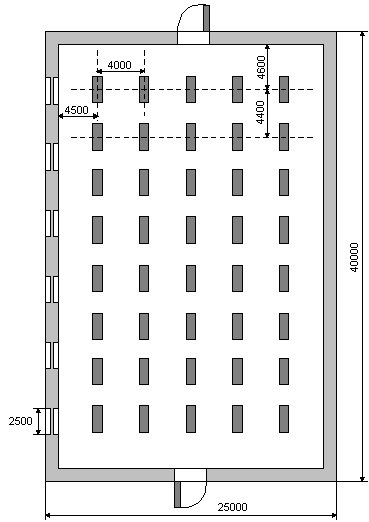
Рисунок 14.3.
14.1.5.1.
Обеспечение электробезопасности.
Питание оборудования цеха осуществляется от 3-х
фазной сети переменного тока, напряжением 220-380 В, частотой 50 Гц с
изолированной нейтралью.
Причинами поражения электрическим током при
эксплуатаации оборудования для производства печатных плат являются следующие
факторы:
– случайное прикосновение или приближение на опасное расстояние к токоведущим
частям, находящимся под напряжением;
– появление напряжения на
металлических конструктивных частях электрооборудования
- корпусах, кожухах и т. п. - в результате
повреждения изоляции
и других причин;
– появление напряжения на отключенных токоведущих
частях, на которых работают люди, вследствие
ошибочного включения установки;
Для обеспечения безопасности от поражения электрическим
током всех зданий и сооружений применяют защитное заземление. Защитное
заземление - преднамеренное соединение с землей оборудования, не находящегося
под напряжением в нормальных условиях эксплуатации, но которые могут оказаться
под напряжением в результате нарушения изоляции установки.
Произведем расчет системы защитного заземления, а
именно расчет групповых заземлителей в однородной земле с размещением по
контуру [16].
Определим сопротивление одного вертикального
электрода по формуле:
 (14.8)
(14.8)
где  - сопротивление
одиночного вертикального электрода, Ом;
- сопротивление
одиночного вертикального электрода, Ом;
 - сопротивление грунта
Ом м;
- сопротивление грунта
Ом м;
L - длина стержня;
b - ширина стержня;
 , где
, где  - длина стержня выше
уровня земли.
- длина стержня выше
уровня земли.
Грунт на территории здания - суглинок, величина
удельного сопротивления которого  .
.
В качестве искусственных заземлителей принимаем
трубы длиной L=2,3 м, диаметром b=0,15 м.
 м
м
Тогда получим
 Ом
Ом
Определим количество вертикальных электродов по
таблице [16] используя соотношение  ,
,
 - коэффициент использования
вертикальных электродов;
- коэффициент использования
вертикальных электродов;
 - допустимое сопротивление искомых
заземлителей;
- допустимое сопротивление искомых
заземлителей;
n - количество вертикальных электродов.
 ,
, 
Находим длину горизонтального проводника связи по
формуле:
 (14.9)
(14.9)
где L - длина
горизонтального проводника связи, м;
а - расстояние между
двумя вертикальными электродами, оно находится из соотношения  , т.к. размещение
електродов производим по контуру а=6,9.
, т.к. размещение
електродов производим по контуру а=6,9.
 м.
м.
Определим сопротивление горизонтального проводника
связи, соединяющего верхние концы электродов по формуле:
 (14.10)
(14.10)
где  - сопротивление
горизонтального проводника связи Ом.
- сопротивление
горизонтального проводника связи Ом.
 Ом.
Ом.
Далее определяем результирующее сопротивление
искусственного заземлителя.
 (14.11)
(14.11)
где  - коэффициент
использования горизонтальных электродов,
- коэффициент
использования горизонтальных электродов, 
 Ом.
Ом.
Проведенный расчет показывает, что предлагаемые
заземлители удовлетворяют условию групповых заземлителей.
 ,
, 
14.1.5.2.
Пожарная безопасность.
Основными причинами пожаров в цехе являются:
1. Неисправность
электрооборудования;
2. Самовольная модернизация
установок с отклонением от технологических схем;
3. Несоблюдение графика планового
ремонта;
В соответствии с СНиП2.09.02-85
здание имеет категорию взрывопожарной опасности Д, т.е. производство, связанное
с применением негорючих веществ в холодильном состоянии. Огнестойкость здания
определяется по СНиП2.01.02-85. Производственный цех относится к III категории.
В соответствии с требованиями к противопожарной безопасности в помещении находятся
22 углекислотных стационарных огнетушителя типа ОУ-8. Для более быстрого
реагирования пожарной службы в цеху расположены дымовые извещатели МД-3, каждый
из которых обслуживает площадь до 85 м2. Соответственно в цеху их
устанавливается 12 шт.
При возгорании помещения необходимо в кратчайший
срок эвакуировать всех людей из здания.
Схема эвакуации людей из здания приведена на рис.
14.4.
14.2. Охрана окружающей среды
В процессе производства печатных плат в воздух
рабочей зоны выделяются различные вредные вещества. Источником выделения
вредных веществ в атмосферный воздух цеха является следующее технологическое оборудование:
ножницы для нарезки заготовок, сверлильные и фрезерные станки, установки
химической подготовки и подтравливания поверхности, установки для нанесения
фоторезистов и красок, установки экспонирования, проявления и снятия
фоторезистов.
Схема эвакуации людей из цеха
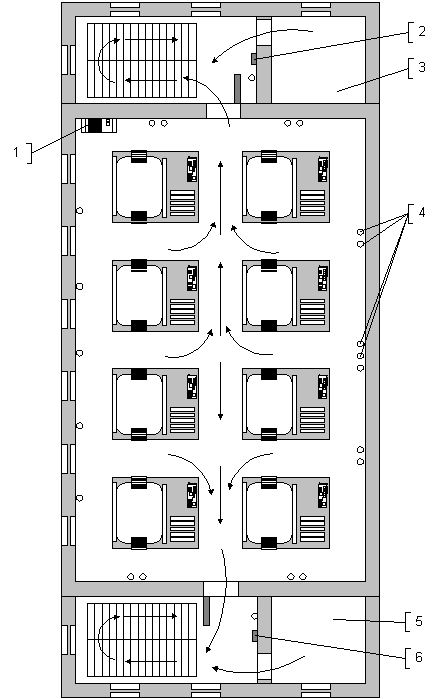
1 - щит для отключения электричества;
2, 6 - пожарные краны;
4 - огнетушители;
3, 5 - комнаты для переодевания.
Рисунок 14.4.
Определим количество вредных веществ выделяемых в
воздух в процессе производства и оценим их величину по отношению к допустимым
нормам. Валовое выделение загрязняющих веществ определяется исходя из
нормо-часов работы оборудования и понятия условной платы.
Количество вредного вещества (т/год), отходящего от
единицы технологического оборудования определяется по формуле:
Mi = 3,6 qi
W(1,2,3) 10-3
где W(1,2,3) - определяется по формуле:
W1 = (Nii / L) Kii
Nii - общее количество слоев i-го
типа реальной печатной платы, обрабатываемых при i
- технологическом процессе в соответствии с программой выпуска, слоев/год; L-
производительность оборудования, слоев/час; qi - удельное количество
вредного вещества, выделяющегося при технологическом процессе, г/с.
Количество вредных веществ, выделяющихся в
атмосферный воздух при механической обработке заготовок.
При получении заготовок.
Используются ножницы роликовые Ю.1.015.01.00.000.
Стеклотекстолит фольгированный СФ-2Н-35-1,5
Пыль стеклотекстолита  г/с.
г/с.
Пыль медная  г/с.
г/с.
Периметр платы  мм.
мм.

NЗ = 1000 слоев/год.
L = 720 слоев/час.

Выделения пыли стеклотекстолита:
 кг/год.
кг/год.
Выделения пыли меди:
 кг/год.
кг/год.
При получение фиксирующих и технологических отверстий.
Используется настольный сверлильный станок 2Н-106П.
Стеклотекстолит фольгированный СФ-2Н-35-1,5.
Пыль стеклотекстолита  г/с.
г/с.
Пыль медная  г/с.
г/с.
В плате имеется 4 фиксирующих отверстия 

NФО = 1000 слоев/год.
L = 360 слоев/час.

Выделения пыли стеклотекстолита:
 кг/год.
кг/год.
Выделения пыли меди:
 кг/год.
кг/год.
При получение монтажных отверстий.
Используется сверлильный станок с ЧПУ СФ-72Б.
Стеклотекстолит фольгированный СФ-2Н-35-1,5.
Пыль стеклотекстолита  г/с.
г/с.
Пыль медная  г/с.
г/с.
В плате имеется 826 монтажных отверстия 

NМО = 1000 слоев/год.
L = 40 слоев/час.

Выделения пыли стеклотекстолита:
 кг/год.
кг/год.
Выделения пыли меди:
 кг/год.
кг/год.
При фрезеровании печатной платы по контуру дисковой
фрезой.
Используется фрезерный станок 3А-64Д.676П
Стеклотекстолит фольгированный СФ-2Н-35-1,5.
Пыль стеклотекстолита  г/с.
г/с.
Пыль медная  г/с.
г/с.
Периметр платы  мм.
мм.

NФ = 1000 слоев/год.
L = 60 слоев/час.

Выделения пыли стеклотекстолита:
 кг/год.
кг/год.
Выделения пыли меди:
 кг/год.
кг/год.
При проявлении рисунка печатной платы.
Используется установка УПФ ГГМЗ.250.001.
Выделения метилхлороформа  г/с.
г/с.
Площадь платы  м.
м.

NП = 1000 слоев/год.
L = 160 слоев/час.

Выделения метилхлороформа:
 кг/год.
кг/год.
При удалении фоторезиста и краски.
Используется установка УПФ ГГМЗ.254.001.
Выделения метилена хлористого  г/с.
г/с.
Площадь платы  м.
м.

NП = 1000 слоев/год.
L = 160 слоев/час.

Выделения метилена хлористого:
 кг/год.
кг/год.
При экспонировании рисунка печатной платы.
Используется установка СКЦИ.442.152.001.
Выделения озона  г/с.
г/с.
Площадь платы  м.
м.

NП = 1000 слоев/год.
L = 40 слоев/час.

Выделения озона:
 г/год.
г/год.
В итоге получаем выделения пыли стеклотекстолита:
 кг/год.
кг/год.
Выделение пыли меди:
 кг/год.
кг/год.
Выделение метилхлороформа:
 кг/год.
кг/год.
Выделение метилена хлористого:
 кг/год.
кг/год.
Выделения озона:
 г/год.
г/год.
По величине мощности выбросов устанавливается
норматив ПДВ исходя из условий, чтобы за пределами санитарно-защитной зоны
концентрация, созданная рассмотренными источниками выбросов, в сумме с фоновой
не превышала ПДК, установленного ГОСТ 12.1.005-88.
15. Организационно-экономический раздел
Целью разработки данного дипломного проекта является проектирование
горизонтального канала наведения и стабилизации привода ОЭС. В результате был
разработан цифровой следящий электропривод который значительно превосходит по
своим техническим показателям аналогичные изделия: имеет более высокие
быстродействие и точность; гораздо легче в обслуживании. Но одним из важнейших
критериев является экономическая выгода – принесет ли данное изделие
дополнительную прибыль. Ответ на поставленный вопрос мы получим только проведя
соответствующие расчеты, которые будут рассмотрены в этом разделе.
При экономическом
анализе ОКР можно использовать ленточные диаграммы, а также сетевые графики.
Так как ленточные диаграммы не отражают в полной мере взаимосвязи между
отдельными работами, тогда как это весьма необходимо при планировании и
выполнении сложных комплексов, состоящих из многочисленных работ, часть из
которых целесообразно в той или иной степени совмещать во времени. Из-за
отсутствия показанных на линейном графике могут возникать непредвиденные
простои. В проектной практике нередки случаи, когда изменение условий и
факторов приводит к изменению первоначально намеченных сроков выполнения работ.
В таких случаях, данных, приводимых на ленточном графике, недостаточно для решения
вопросов о том, какие меры должны быть приняты для своевременного выполнения
всего комплекса работ, какие коррективы следует внести в график, как лучше
использовать имеющиеся ресурсы. Таким образом, ленточный график при выполнении
больших сложных комплексных работ, не обеспечивает непрерывности планирования и
оперативного управления.
Данное ОКР является
сложным комплексом работ, и как показано выше для ее оценки линейный график
недостаточен, и для повышения оперативности используем сетевой метод
планирования и управления. Основным документом СПУ является сетевой график.
Сетевой график - это
графическое изображение плана разработки, показывающая взаимосвязь всех работ,
необходимых для достижения конечной цели. В сетевом графике до мельчайших
подробностей анализируется рассматриваемая задача, выявляется последовательность
и взаимосвязь работ.
События сетевого
графика кодируются. Для этого используют натуральный ряд чисел от 0. Для
расчета сетевого графика необходимо составить картотеку событий и картотеку
работ. В картотеке работ формируются названия работ и присваиваются им коды.
Тоже самое делается и с картотекой событий. Картотека событий представлена в
табл. 15.1, а картотека работ в табл. 15.2. Сетевой график отображает
последовательность процесса во времени и не является отражением
пространственной структуры объекта. Сетевой график представлен в приложении 4.
Трудоемкость
разработки этапов ОКР определяется в зависимости от функционального назначения,
группы сложности и новизны проектируемых изделий:
 , (15.1)
, (15.1)
где  - количество
графического материала (чертежей) формата А1, 25-30 листов;
- количество
графического материала (чертежей) формата А1, 25-30 листов;
 - удельная трудоемкость
выполнения конструкции одного чертежа формата А1, 30 час;
- удельная трудоемкость
выполнения конструкции одного чертежа формата А1, 30 час;
 - коэффициент,
учитывающий группу сложности электронного устройства и зависит от степени
усложнения конструкции;
- коэффициент,
учитывающий группу сложности электронного устройства и зависит от степени
усложнения конструкции;
Таблица
15.1.
Картотека событий.
| Номер
события |
Наименование
события |
| 0 |
задание
на диплом получено |
| 1 |
техническое
задание разработано и оформлено |
| 2 |
техническое
задание утверждено |
| 3 |
расчет
и составление сетевого графика выполнено |
| 4 |
анализ
современного состояния в области ЦСЭП проведен |
| 5 |
методики
построения ЦСЭП проанализированы |
| 6 |
структурная
схема ЦСЭП составлена |
| 7 |
структурная
схема ЦСЭП начерчена |
| 8 |
функциональная
схема МПК разработана |
| 9 |
функциональная
схема МПК начерчена |
10
|
принципиальная
схема МПК разработана |
| 11 |
принципиальная
схема усилителя разработана |
| 12 |
принципиальная
схема усилителя расчитана |
| 13 |
принципиальная
схема ЦСЭП начерчена |
| 14 |
печатная
плата ЦСЭП разработана |
| 15 |
печатная
плата ЦСЭП начерчена |
| 16 |
характеристики
ЦСЭП исследованы |
| 17 |
характеристики
ЦСЭП начерчены |
| 18 |
сборочный
чертеж ЦСЭП составлен |
| 19 |
сборочный
чертеж начерчен |
| 20 |
общий
вид электронного блока разработан |
| 21 |
общий
вид электронного блока оформлен |
| 22 |
Технологическая
часть выполнена |
| 23 |
раздел
надежности выполнен |
| 24 |
раздел
охраны труда и окружающей среды выполнен |
| 25 |
затраты
на проектирование и изготовление, экономический эффект рассчитаны |
| 26 |
Пояснительная
записка оформлена |
| 27 |
Документация
сдана в ГЭК |
Таблица
15.2.
Картотека работ.
| Код |
Наименование |
Продолжительность
работы |
| 0-1 |
разработка
технического задания |
3 |
| 1-2 |
утверждение
технического задания |
2 |
| 2-3 |
расчет
и составление сетевого графика |
1 |
| 3-4 |
анализ
современного состояния в области ЦСЭП |
1 |
| 3-5 |
анализ
методик построения ЦСЭП |
2 |
| 4-6 |
фиктивная
работа |
1 |
| 5-6 |
Составление
структурной схемы ЦСЭП |
- |
| 6-7 |
Оформление
чертежа структурной схемы |
5 |
| 6-8 |
Разработка
функциональной схемы МПК |
3 |
| 8-9 |
Черчение
функциональной схемы МПК |
6 |
| 7-11 |
фиктивная
работа |
4 |
| 8-10 |
Разработка
принципиальной схемы МПК |
3 |
| 6-11 |
Разработка
принципиальной схемы усилителя |
2 |
| 11-12 |
расчет
принципиальной схемы усилителя |
3 |
| 11-13 |
черчение
принципиальной схемы ЦСЭП |
5 |
| 9-13 |
фиктивная
работа |
- |
| 10-15 |
фиктивная
работа |
- |
| 13-14 |
фиктивная
работа |
4 |
| 12-14 |
разработка
печатной платы ЦСЭП |
3 |
| 14-15 |
оформление
печатной платы |
4 |
| 12-17 |
Исследование
характеристик ЦСЭП |
6 |
| 17-18 |
Оформление
характеристик ЦСЭП |
8 |
| 15-21 |
фиктивная
работа |
- |
| 18-24 |
фиктивная
работа |
5 |
| 14-19 |
составление
сборочного чертежа ЦСЭП |
2 |
| 19-20 |
черчение
сборочного чертежа |
8 |
| 20-24 |
фиктивная
работа |
8 |
| 19-21 |
разработка
общего вида электронного блока |
12 |
| 21-22 |
оформление
общего вида электронного блока |
8 |
| 22-25 |
Фиктивная
работа |
4 |
| 21-23 |
Выполнение
технологической части |
5 |
| 23-25 |
Фиктивная
работа |
6 |
| 14-24 |
Расчет
надежности |
4 |
| 6-16 |
расчет
охраны труда и окружающей среды |
- |
| 24-25 |
Оформление
организационно-экономической части |
- |
| 16-25 |
Фиктивная
работа |
8 |
| 25-26 |
Оформление
пояснительной записки |
8 |
| 26-27 |
сдача
документации в ГЭК |
15 |
 - коэффициент снижения
трудоемкости, учитывающий заимствование деталей и узлов в проектируемом
электронном устройстве, в данной системе 0.6;
- коэффициент снижения
трудоемкости, учитывающий заимствование деталей и узлов в проектируемом
электронном устройстве, в данной системе 0.6;
 - доля трудоемкости
этапа «Разработка рабочей документации» в общей трудоемкости ОКР, принимается
0.6;
- доля трудоемкости
этапа «Разработка рабочей документации» в общей трудоемкости ОКР, принимается
0.6;
 - трудоемкость
соответствующего i-го этапа в общей трудоемкости
ОКР, % (см. табл. 15.3).
- трудоемкость
соответствующего i-го этапа в общей трудоемкости
ОКР, % (см. табл. 15.3).
Соотношение трудовых
затрат по отдельным этапам ОКР представлены в табл. 15.3.Группу сложности
устанавливают в соответствии с техническими параметрами, характеристиками
сборочных единиц электронного устройства и нормативами вре-
Таблица
15.3.
| N
п/п |
Стадии
ОКР |
Трудоемкость,
в % к трудоемкости рабочего проекта |
| 1. |
Разработка
технического задания на проектирование |
2.5 |
| 2. |
Разработка
технологического предложения |
2.5 |
| 3. |
Разработка
эскизного проекта |
15.0 |
| 4. |
Разработка
технического проекта |
20.0 |
| 5. |
Разработка
рабочей документации
в
том числе:
·
изготовление опытного образца и заводские испытания
·
разработка конструкторской документации
·
государственные испытания опытного образца и корректировка
конструкторской документации
|
30.0
25.0
5.0
|
| Итого |
100.0 |
мени на разработку
конструкторской документации в НИИ и КБ по направлениям техники и типовыми
нормами времени на разработку конструкторской документации, разработанными
ЦБНТ. В данной системе третья группа сложности. Она включает разработку
сборочных единиц, воспроизводящих имеющиеся изделия с конструктивной и
размерной переработкой (заимствован только принцип). Тогда  принимает значение
1.25.
принимает значение
1.25.
Тогда подставив
значения в формулу(15.1) получим:
 (н-час)
(н-час)

Продолжительность
выполнения ОКР устанавливается в календарных днях. Определение состава исполнителей
ОКР производится в зависимости от заданной (директивной) продолжительности
выполнения работ принимается 5-6 мес., что соответствует периоду дипломного
проектирования, включая преддипломную практику:
 , (15.2)
, (15.2)
где  - количество
исполнителей соответствующего i-го этапа
ОКР;
- количество
исполнителей соответствующего i-го этапа
ОКР;
 - коэффициент перевода
рабочих дней в календарные при
- коэффициент перевода
рабочих дней в календарные при
пятидневном режиме
работы,  ;
;
 - действительный
(эффективный) фонд времени работы одного исполнителя, чел-час, в расчетах принимается
7.2;
- действительный
(эффективный) фонд времени работы одного исполнителя, чел-час, в расчетах принимается
7.2;
 - заданная (директивная)
продолжительность выполнения работ в ОКР, кал. дн.;
- заданная (директивная)
продолжительность выполнения работ в ОКР, кал. дн.;
 - трудоемкость i-го этапа (см. формулу (15.1)).
- трудоемкость i-го этапа (см. формулу (15.1)).
 .
.
Тогда общая
численность исполнителей ОКР:
Выполненные расчеты
по определению трудоемкости и продолжительности отдельных этапов ОКР,
количество исполнителей сведем в табл. 15.4.
На основании
рассчитанных этапов и видов работ строится сетевой график выполнения ОКР,
результаты расчетов которого приведены в приложении 5.
Таблица
15.4.
| N
п/п |
Наименование
этапов ОКР |
Вид
работ |
Кол-во
исполнителей |
Трудоемкость,
н-час |
Продолжительность
работ, кал. дн. |
| 1. |
Разработка
технического задания |
Разработка
технического. задания, утверждение задания |
0.05 |
23.4 |
4.68 |
| 2. |
Разработка
технологичес-кого предложения |
Расчет
и составление сетевого графика, анализ соврем. состояния в области ЦСЭП,
анализ методик построения ЦСЭП |
0.05 |
23.4 |
4.68 |
| 3. |
Разработка
эскизного проекта |
Составление
структурной схемы ЦСЭП, разработка функциональной схемы МПК |
0.28 |
140.6 |
28.12 |
| 4. |
Разработка
технического предложения |
Разработка
принципиальной схемы МПК, разработка принципиальной схемы усилителя, расчет
усилителя, формирование печатной платы ЦСЭП |
0.38 |
187.5 |
37.5 |
| 5. |
Разработка
рабочей документации |
Составление
сборочного чертежа и чертежа общего вида, выполнение технологической части,
расчет надежности, расчет ОТ и ОС, оформление организационно-экономической
части, сдача документации в ГЭК |
1.13 |
562.5 |
112.5 |
Определение плановой
себестоимости проведения ОКР.
При планировании
себестоимости ОКР должно быть обеспечено полное и достоверное отражение всех
видов расходов, связанных с их выполнением.
В процессе
калькуляции себестоимости ОКР используется следующая группировка затрат по
статьям, представленная в табл. 15.5.
В статью материалы,
покупные изделия и полуфабрикаты также включены затраты на оформление
документации, а именно:
·
бумага;
·
листы формата
А1;
·
тушь;
·
перья;
·
канцелярские
принадлежности и т.п.
Расчет затрат на
оформление документации сводится в табл. 15.6.
Затраты по статье 2
отсутствуют.
Статья Основная заработная плата включает заработную
плату работников, участвующих в данном виде работ с учетом премий.
Таблица 15.5.
Калькуляция плановой
себестоимости проведения ОКР
| N
п/п |
Наименование
статей затрат |
| 1. |
Материалы
(за вычетом возвратных отходов), покупные изделия и полуфабрикаты |
| 2. |
Специальное
оборудование для научных (экспериментальных) работ |
| 3. |
Основная
заработная плата |
| 4. |
Дополнительная
заработная плата |
| 5. |
Отчисления
на социальное обеспечение |
| 6. |
Научные
и производственные командировки |
| 7. |
Оплата
работ, выполняемых сторонними организациями и предприятиями |
| 8. |
Прочие
прямые расходы |
| 9. |
Итого
плановая себестоимость |
Таблица 15.6.
| №
п/п |
Наименование
затрат |
Сумма,
руб. |
| 1 |
Бумага |
160 |
| 2 |
Листы
формата А1 |
60 |
| 3 |
Тушь |
8 |
| 4 |
Чернила
для принтера |
350 |
| 5 |
Чертежные
принадлежности |
80 |
| 6 |
Канцелярские
товары |
50 |
| 7 |
ИТОГО |
708 |
Расчет основной
заработной платы сводится в табл. 15.7.
Заработная плата с
учетом размера премий:
З=Зосн×1.2
З=6173,1×1.2=7407,7 (т.руб).
Статья 4 включает
затраты по дополнительной зарплате и принимается в размере 10-20% от основной
зарплаты.
Таблица
15.7.
| N
п/п |
Наименование
этапов |
Исполнители
по категориям |
Трудоемкость,
чел-дн. |
Зарплата,
приход. на 1 чел.-дн., т.руб. |
Всего
заработная плата |
| 1. |
Разработка
технического задания на проектирование |
Руководитель
Исполнитель
|
1
2.93
|
1500/21=71,4
850/21=40,5
|
71,4
118,7
|
| 2. |
Разработка
технологического предложения |
Руководитель
Исполнитель
|
1
2.93
|
71,4
40,5
|
71,4
118,7
|
| 3. |
Разработка
эскизного проекта |
Руководитель
Исполнитель
|
4
17.6
|
71,4
40,5
|
285,6
712,8
|
| 4. |
Разработка
технического проекта |
Руководитель
Исполнитель
|
6
23.4
|
71,4
40,5
|
428,4
947,7
|
| 5. |
Разработка
рабочей документации |
Руководитель
Исполнитель
|
8
70.3
|
71,4
40,5
|
571,2
2847,2
|
| Итого |
6173,1 |
Статья 5 включает
затраты отчисления в бюджет государства по установленным законодательством
нормам. Эти затраты составляют 39 % от суммы основной и дополнительной зарплаты.
Затраты по статье 7
отсутствуют.
Затраты по статье 8
принимаются в размере 5% от суммы всех предшествующих статей.
Расчет затрат на изготовление
опытного образца электронного устройства и предпроизводственных затрат.
Затраты на
изготовление опытного образца электронного устройства рассчитываются по
формуле:
 , (15.5)
, (15.5)
где  - затраты на материалы
(за вычетом реализуемых отходов), покупные комплектующие изделия и полуфабрикаты
(см. табл. 15.8);
- затраты на материалы
(за вычетом реализуемых отходов), покупные комплектующие изделия и полуфабрикаты
(см. табл. 15.8);
 - коэффициент,
учитывающий транспортно-заготовительные расходы, в расчетах принимаются 0.04;
- коэффициент,
учитывающий транспортно-заготовительные расходы, в расчетах принимаются 0.04;
 - заработная плата
научно-производственного персонала опытного производства, занятого изготовлением
опытной продукции, т.руб.;
- заработная плата
научно-производственного персонала опытного производства, занятого изготовлением
опытной продукции, т.руб.;
 - основная заработная
плата научно-производственного персонала, т.руб.;
- основная заработная
плата научно-производственного персонала, т.руб.;
 - коэффициент,
учитывающий косвенные (накладные) расходы по обслуживанию и управлению опытного
производства, принимается равным 2.0...2.5;
- коэффициент,
учитывающий косвенные (накладные) расходы по обслуживанию и управлению опытного
производства, принимается равным 2.0...2.5;
 - коэффициент,
учитывающий внепроизводственные расходы, в расчетах принимается 0.05.
- коэффициент,
учитывающий внепроизводственные расходы, в расчетах принимается 0.05.
Заработная плата
научно-производственного персонала опытного производства определяется как:
 , (15.6)
, (15.6)
где  - тарифная или окладная
оплата научно-производственного персонала;
- тарифная или окладная
оплата научно-производственного персонала;
1,2 - коэффициент,
учитывающий премию из фонда заработной платы;
1,1 - коэффициент,
учитывающий дополнительную заработную плату;
1,395 - коэффициент,
учитывающий отчисления на социальное обеспечение.
Опытный образец
изготавливается за 10 рабочих дней. Изготавливают его техник и руководитель.
Следовательно, тарифная оплата вычисляется:
Зпл=(500/21)×10+(1500/21)×1=309,5 руб.
Тогда заработная
плата научно-производственного персонала:
Зпл=309,5×1,2×1,1×1,395=570 руб.
Основная заработная
плата:
 (15.7)
(15.7)
Следовательно,
подставляя значения получим:
Зплосн =
309,5×1,2=371,4 руб.
Вычислим затраты на
изготовление опытного образца электронного устройства:
Соп=(153370×(1+0,04)+570+371,4×2,2)×(1+0,5)= 168936,5 руб.
Предпроизводственные затраты научно-технической организации определяются
по формуле:
 (15.8)
(15.8)
где  - затраты по калькуляции
темы;
- затраты по калькуляции
темы;
 - затраты на
изготовление опытного образца;
- затраты на
изготовление опытного образца;
 - затраты на подготовку
образца серийного производства.
- затраты на подготовку
образца серийного производства.
Затраты на подготовку
образца серийного производства определяется как  . Затраты по калькуляции темы
включили в себя затраты на изготовление опытного образца. Следовательно,
предпроизводственные затраты составят:
. Затраты по калькуляции темы
включили в себя затраты на изготовление опытного образца. Следовательно,
предпроизводственные затраты составят:
Зпредпр = 257375,7+1,3×257375,7 = 591964,11 руб.
Таблица
15.8.
Калькуляция плановой
себестоимости проведения ОКР
| N
п/п |
Наименование
статей затрат |
Сумма,
руб. |
| 1. |
Материалы
(за вычетом возвратных отходов), покупные изделия и полуфабрикаты |
198575 |
| 2. |
Специальное
оборудование для научных (экспериментальных) работ |
0 |
| 3. |
Основная
заработная плата |
7407,2 |
| 4. |
Дополнительная
заработная плата |
740,8 |
| 5. |
Отчисления
на социальное обеспечение |
3177,9 |
| 6. |
Научные
и производственные командировки |
800 |
| 7. |
Оплата
работ, выполняемых сторонними организациями и предприятиями |
0 |
| 8. |
Прочие
прямые расходы |
46674,8 |
| 9. |
Итого
плановая себестоимость |
257376 |
Расчет затрат на изготовление
проектируемого электронного устройства.
Для определения
затрат на изготовление проектируемого электронного устройства составляется
калькуляция по соответствующим статьям, перечисленным в табл. 15.9.
Расчет стоимости
основных материалов, покупных комплектующих изделий и полуфабрикатов с учетом
транспортно-заготовительных расходов сводим в табл. 15.10.
Статья «Основная
заработная плата основного производственного персонала» включает тарифную
заработную плату и премии. Расчет тарифной заработной платы сводится в табл.
15.11.
Таблица 15.9.
Калькуляция себестоимости
проектируемого электронного устройства.
|
N
п/п
|
Наименование
статей калькуляции |
Сумма,
руб.
|
| 1. |
Основные
материалы (за вычетом реализуемых отходов), покупные комплектующие изделия,
полуфабрикаты и услуги кооперативных предприятий. |
184044 |
| 2. |
Вспомогательные
материалы для технологических целей |
139,33 |
| 3. |
Основная
заработная плата основного производственного персонала |
40,68 |
| 4. |
Дополнительная
заработная плата основного производственного персонала |
6102 |
| 5. |
Отчисления
на социальное обеспечение |
18,49 |
| 6. |
Расходы
на содержание и эксплуатацию оборудования и транспортных средств |
52,9 |
| 7. |
Общепроизводственные
расходы |
40,68 |
| 8. |
Общехозяйственные
расходы |
28,48 |
| 9. |
Внепроизводственные
расходы |
417,1 |
| 10. |
Итого
полная себестоимость |
190937,7 |
Таблица 15.11.
| N
п/п |
Наименование
работ |
Тарифный
разряд выполняемой работы |
Часовая
тарифная ставка, т.руб. |
Трудоемкость
работы, нормо-час |
Тарифная
заработная плата, т.руб. |
| 1. |
Сборка |
3 |
3.0 |
3 |
9.0 |
| 2. |
Монтаж |
5 |
3.75 |
4 |
15 |
| 3. |
Испытание |
4 |
3.3 |
1 |
3.3 |
| 4. |
Отладка |
4 |
3.3 |
2 |
6.6 |
| Итого |
33.9 |
Таблица 15.10.
|
N
п/п
|
Наименование
основных материалов, комплектующих изделий и полуфабрикатов |
Единица
измерения |
Кол-во
единиц на изделие
|
Сумма
затрат на изделие, руб. |
| 1. |
Блок
обработки сигналов |
шт. |
1 |
17400 |
| 2. |
Блок
питания |
шт. |
1 |
150 |
| 3. |
БУ |
шт. |
1 |
17400 |
| 4. |
провода |
м |
50 |
100 |
| 5. |
электроника |
шт. |
1 |
34800 |
| 6. |
ГДУ |
шт. |
1 |
17400 |
| 7. |
ДУС |
шт. |
1 |
13920 |
| 8. |
двигатель |
шт. |
1 |
52200 |
| Итого
стоимость основных материалов, покупных и комплектующих изделий и полуфабрикатов |
153370 |
Заключение
В данном дипломном
проекте спроектирован привод горизонтального канала наведения и стабилизации
ОЭС. В соответствии с расчетом выбран двигатель привода – ДМБ (двигатель
бесконтактный магнитный), имеющий ряд существенных преимуществ по сравнению с
другими существующими двигателями данного класса, разработаны функциональная
схема и структурная схема линейной математической модели следящего привода.
Синтез системы производился исходя из требований по времени переброса и точности
слежения за подвижным объектом в условиях воздействия качек на носитель
следящей системы. Найденные параметры модели привода горизонтального канала наведения
и стабилизации ОЭС обеспечивают ошибку слежения 0,1 мрад, время переходного
процесса 0,025 с и величину перерегулирования 2,5%, что удовлетворяет
требованиям к системам данного класса точности и техническому заданию.
На основании
современных методов проектирования разработана конструкция печатной плат БУ
привода, технологические процессы их изготовления, произведен расчет теплового
режима работы платы и надежность эксплуатации устройства.
Большое внимание охране труда и
окружающей среды. Произведен расчет параметров производства печатных плат БУ
привода ГКНиС: количество людей, занятых непосредственно изготовлением изделий,
размеры цеха, установка оборудования, вентиляция, освещение. Определена
категория пожаробезопасности производства (III), предложена схема эвакуации
людей при пожаре и расположение противопожарного оборудования. Количество
вредных выбросов при производстве изделия не превышают ПДК.
Экономической часть включает в
себя составление сетевого плана проектирования и изготовления опытного образца
привода ГКНиС ОЭС, расчет критического пути, который составил 75 дней, и расчет
себестоимости ОКР и стоимости опытного образца (257376 руб. и 190937,7 руб.
соответственно).
Библиографический список
1.
Проектирование
следящих систем. Колл. авторов. Под ред. Л.В. Рабиновича.М.: Машиностроение,
1969.-500 с.
2.
Следящие
приводы. В 2-х кн. Под ред. Б.К. Чемоданова.-М.: Энергия, 1976.-384 с., ил.
3.
Макаров
И.М., Менский Б.М. Линейные автоматические системы.-2-е изд., перераб. и
доп.-М.: Машиностроение, 1982.-504 с., ил.
4.
Бесекерский
В.А., Попов Е.П. Теория систем автоматического регулирования.-3-е
изд.,исправленное.-М.: Наука, 1975.-768 с., ил.
5.
Техническая
кибернетика. Теория систем автоматического регулирования. Книга 1. Колл.
авторов. Под ред. В.В. Солодовникова. -М.: Машиностроение, 1967.-770 с.
6.
Изерман Р.
Цифровые системы управления. Пер. с англ.-М.: Мир, 1984.-541 с., ил.
7.
Гурецкий Х.
Анализ и синтез систем управления с запаздыванием. Пер. с польского.-М.:
Машиностроение, 1974.-328 с.
8.
Павловский
М.А. Теория гироскопов.-К.: Вища шк. Головное изд-во, 1986.-303 с., ил.
9.
Одинцов А.А.
Теория и расчетгироскопических приборов.-К.: Вища шк. Головное изд-во,
1985.-392 с., ил.
10.
Справочник конструктора РЭА. Общие принципы конструирования / Под
редакцией Варламова Р.Г. - М.:Советское радио, 1980.-480 с.
11.
Жукова Г.А., Жуков В.П. Курсовое и дипломное проектирование по низковольтным
электрическим аппаратам.-М.: Высш. шк., 1987.-160 с.
12.
Гусев А.И. Проектирование устройств автоматики и телемеханики. - Саратов:
СПИ, 1978.-72 с.
13.
Митрейкин И.А., Озерский А.И. Конструирование аппаратуры автоматики и
телемеханики.-М.: Машиностроение, 1975.-272 с.
14.
Жигалов А.Т.
Конструирование и технология печатных плат. - М.: Высшая школа, 1983.
15.
Справочная
книга по светотехнике / Под ред. Ю.Б. Айзенберга. - М.: Энергоатомиздат, 1983.
16.
Справочник
проектировщика санитарно-технических устройств. В 3-х ч. / Под ред. И.Г.
Староверова. - М.: Стройиздат, 1978.
17.
Козлов Б.А., Ушаков И.А. Справочник по расчёту надёжности аппаратуры
радиоэлектроники и автоматки.-М.: Сов. радио, 1975.-471 с.
18.
Сотсков Б.С. Основы теории и расчёта надёжности элементов и устройств автоматики
и вычислительной техники. - М.:Высш. шк., 1970.-271 с.